Антропометрические и масс-инерционные характеристики тела человека. Динамика опорно-двигательного аппарата (ОДА)
Тело человека представляет собой сложную биомеханическую систему, которая в повседневной жизни может испытывать значительные ускорения, а в спорте высших достижений особенно. При этом возникают усилия, приводящие к нарушению координации движений, травмам и прочим изменениям в тканях ОДА.
Исследования движений человека (спортсмена) аналитическими методами механики проводятся с помощью моделей различной сложности, заменяющих ОДА и воспроизводящих действительную картину движений со степенью точности, достаточной для поставленных в процессе исследований задач.
Все сочленения звеньев тела можно моделировать геометрически идеальными вращательными шарнирами.
Чтобы воспроизвести движения тела человека, в моделях из максимально возможных шести измеряемых движений для каждого твердого звена, когда оно не присоединено к соседним звеньям (трех поступательных и трех вращательных относительно трех координатных осей, фиксированных на соседнем звене), при наложении кинематических связей исключаются все поступательные и остаются лишь вращательные движения, причем нередко допускаются только некоторые вращательные движения из трех возможных. Все оставшиеся вращательные движения составляют степени свободы звеньев.
Формула для определения числа степеней свободы ОДА в целом:
|
где и — число степеней свободы; N — число подвижных звеньев в модели тела; / — число ограничений степеней свободы в соединениях-суставах; Р. — число соединений с ( ограничениями. При этом ЕР. = N — /.
Общее число степеней свободы тела человека составляет около 6 • 144 — 5 • 81 — 4 • 33 — 3 • 29 = 240 (A. Morecki et al., 1969), но с полной достоверностью точное число неизвестно в связи с приближенным характером модели.
По кинематической схеме модели (см. рис. 17.43), подобно упрощенному скелету руки (см. рис. 17.43, г), легко подсчитать, что в этом примере подвижность руки относительно плечевого пояса оценивается 7-ю степенями свободы.
Положение о преодолении избыточных степеней свободы при работе наглядно изображается на кинематической схеме (см. рис. 17.43, а), если момент мышечных сил в каждом суставе разложить на его составляющие по степени свободы (см. 17.43, г). Очевидно, что число этих компонент момента будет равно числу степеней свободы.
Различают две задачи динамики. При решении первой задачи считается, что известны законы движения всех звеньев (обобщенные координаты) и определяются суставные моменты и динамические нагрузки в суставах. Этот расчет позволяет оценить прочность, жесткость и надежность исследуемой системы. Вторая задача динамики заключается в определении динамических ошибок — отклонений законов движения от заданных. Известными считаются внешние силы и находятся законы движения.
При решении задач динамики необходимо выбрать и обосновать динамическую расчетную схему. Важную роль при их построении играет моделирование воздействий внешних факторов, в том числе трения, материала и др. Затем строят математическую модель, соответствующую динамической расчетной схеме.
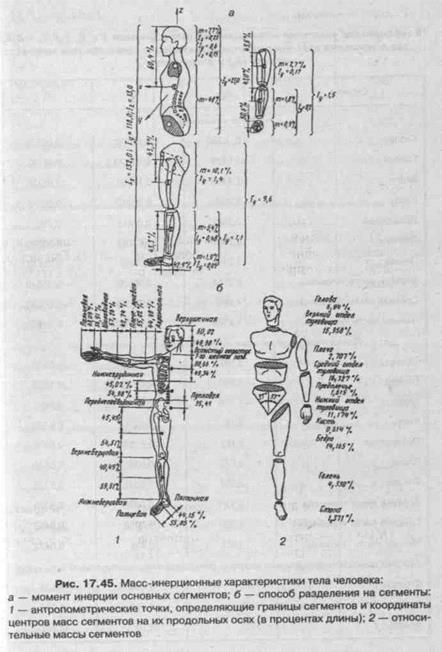
При построении динамических расчетных схем тела человека актуальным является определение масс-инерционных характеристик (МИХ) сегментов тела: масс, моментов инерции, координат центров масс отдельных сегментов (частей) тела. Границы сегментов набирают таким образом, чтобы внутри сегмента отсутствовала деформация или непроизвольное изменение геометрии масс сегмента. Обычно выделяют следующие сегменты: стопу, голень, бедро, кисть, предплечье, плечо, голову, верхний, средний и нижней отделы туловища. На рис. 17.45 указаны значения моментов
|
|
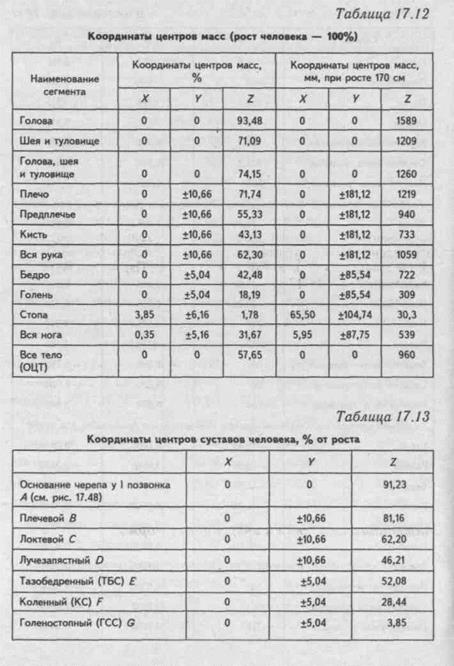
инерции основных сегментов (оси обозначены в соответствии с рис. 2.1); на рис. 17.45 — антропометрические точки, определяющие границы сегментов и координаты центров масс сегментов на их продольных осях, в табл. 17.12 — относительные массы сегментов (за 100% принята масса тела).
Оценку масс-инерционных параметров выполняют как прямыми методами (погружение в воду, внезапное освобождение, сечение трупов, компьютерная томография и др.), так и с использованием методов математического и физического моделирования. В последние годы наиболее удобным методом является метод геометрического моделирования.
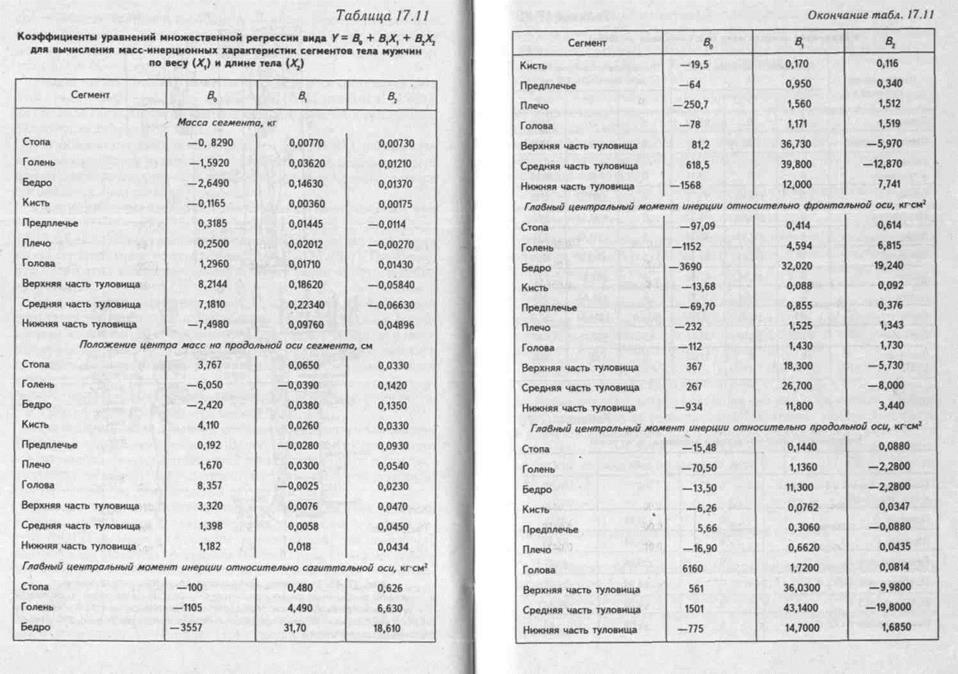
Метод прост, для его выполнения необходимы антропометрические измерения (10 обхватов и 10 длин). Минимум ошибок прогнозируется для МИХ отдельных сегментов за счет введения индивидуальных коэффициентов квазиплотности. Кроме этих методов, используют метод определения МИХ по уравнению регрессии, с использованием массы (Xt) и длины тела (X,): Y = В0 + ВХХХ + BJCr Параметры регрессии представлены в табл. 17.11.
Антропометрические характеристики определяют геометрические размеры тела человека и отдельных его сегментов: это величины, случайным образом измеряющиеся в зависимости от возраста, пола, национальности, рода занятий и т. д.
Основные статические, т. е. измерения при фиксированной позе, размеры тела приведены на рис. 17.46, а, и в табл. 17.8.
Динамические антропометрические характеристики используют для оценки объема рабочих движений, зон досягаемости и в других биомеханических и эргономических задачах, в частности при создании антропометрических манекенов. Некоторые динамические параметры приведены в табл. 17.11; 17.12; 17.13и на рис. 17.46,6.
Дата добавления: 2021-11-16; просмотров: 1019;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- IV. Структурно-иерархическая модель личности Реймонда Кеттела
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- Tермодинамика денатурации
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
