Скорость произвольной точки звена манипулятора
Для того, чтобы воспользоваться уравнениями Лагранжа-Эйлера, необходимо знать кинетическую энергию рассматриваемой физической системы, а следовательно, и скорости всех её точек.
Рассмотрим произвольную точку, неподвижную относительно i-го звена и заданную в системе координат i-го звена однородными координатами  (рис. 9.2):
(рис. 9.2):
 . (9-10)
. (9-10)
Обозначим через  координаты этой же точки относительно базовой системы координат. Матрица
координаты этой же точки относительно базовой системы координат. Матрица  обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i-го звена относительно системы координат (i-1)-го звена, а
обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i-го звена относительно системы координат (i-1)-го звена, а  -матрицу, определяющую связь между системой координат i-го звена и базовой системой координат.
-матрицу, определяющую связь между системой координат i-го звена и базовой системой координат.
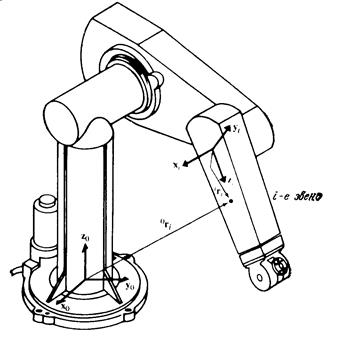
Рисунок 9.2. Точка i-го звена
Тогда связь между  и
и  определяется соотношением:
определяется соотношением:
 , (9-11)
, (9-11)
где  . (9-12)
. (9-12)
Если i-е сочленение – вращательное, то матрица  имеет вид:
имеет вид:
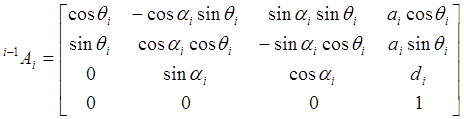 , (9-13)
, (9-13)
Если i-ое сочленение – поступательное, то матрица имеет вид:
 . (9-14)
. (9-14)
В общем все ненулевые элементы матрицы являются функциями величин  и
и  , причём в зависимости от типа j-го сочленения
, причём в зависимости от типа j-го сочленения  или
или  представляет собой присоединенную переменную этого сочленения, а остальные величины – известны (задаются конструкцией манипулятора). В выводах уравнений движения, как вращательных, так и поступательных, используется обобщённые координаты
представляет собой присоединенную переменную этого сочленения, а остальные величины – известны (задаются конструкцией манипулятора). В выводах уравнений движения, как вращательных, так и поступательных, используется обобщённые координаты  ,
,  , если i-е сочленение – вращательное и
, если i-е сочленение – вращательное и  , если i-е сочленение – поступательное).
, если i-е сочленение – поступательное).
Скорость точки  относительно базовой системы координат (при
относительно базовой системы координат (при  ):
):
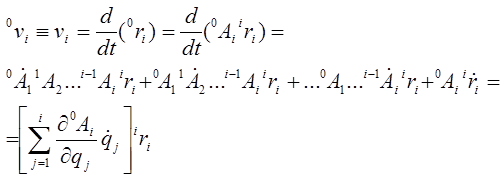 . (9-15)
. (9-15)
Частные произведение матрицы  по переменным
по переменным  легко вычисляется с помощью матрицы
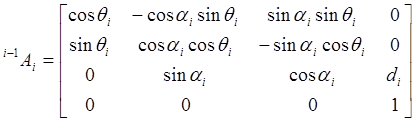
легко вычисляется с помощью матрицы  , которая для вращательного сочленения имеет вид:
, которая для вращательного сочленения имеет вид:
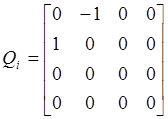 , (9-16а)
, (9-16а)
а для поступательного сочленения:
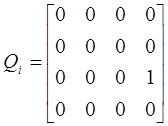 . (9-16б)
. (9-16б)
Используя эту матрицу, можно написать:
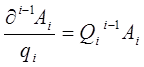 . (9-17)
. (9-17)
Например, для манипулятора с вращательными сочленениями  . Используя равенство (9-13), имеем:
. Используя равенство (9-13), имеем:
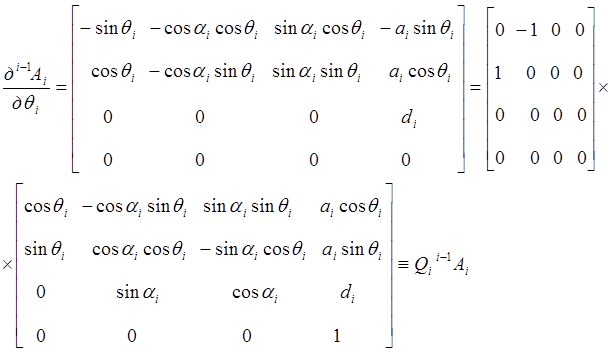
Таким образом, для 
 (9-18)
(9-18)
По смыслу равенство (9-18) описывает изменение положения точек i-го звена, вызванное движением в j-м сочленении манипулятора. Для упрощения формул введём обозначение  , с учетом которого равенство (9-18) можно представить для
, с учетом которого равенство (9-18) можно представить для  :
:
 (9-19)
(9-19)
Используя введённое обозначение, формулу для  можно записать в форме:
можно записать в форме:
 . (9-20)
. (9-20)
Определяем величину, характеризующую эффект взаимодействия сочленений:
 (9-21)
(9-21)
Например, для манипулятора вращательными сочленениями при  и
и  имеем:
имеем:
 .
.
Дата добавления: 2021-11-16; просмотров: 829;
Поиск по сайту
Узнать еще
- II. 4. Скорость оседания эритроцитов (СОЭ)
- III. Охлаждение с заданной скоростью.
- V — скорость судна, м/с.
- А. Уравнения движения точки в декартовых координатах
- А2 - фронтальная проекция точки А.
- Адрес точки доступа сетевого сервиса NSAP
- Аксонометрические проекции фигур. Проекции геометрических тел. Точки на поверхности тел
- Аналіз точки беззбитковості

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
