Решение для шестого сочленения
Необходимо получить такую ориентацию схвата, чтобы поднять объект манипулирования. Для этого надо так расположить схват, чтобы s=y6. Проецируя систему координат схвата (n, s, a) на плоскость x5y5, получаем (рис. 8.4):
 ,
,  , (8-18)
, (8-18)
где  - второй столбцы матрицы
- второй столбцы матрицы  , a nи s– соответственно нормальный и касательный векторы матрицы
, a nи s– соответственно нормальный и касательный векторы матрицы  .
.
Таким образом, для  имеем:
имеем:
 =
=
=  ,
,
 . (8-19)
. (8-19)
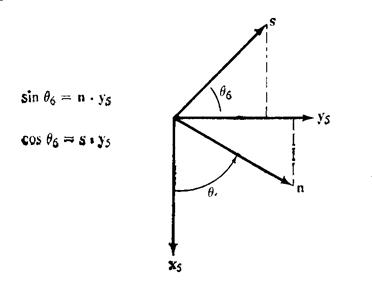
Рисунок 8.4. Решение для 6-го сочленения
Итак, для шестизвенного манипулятора «Пума» существует восемь решений обратной задачи кинематики. Решения для первых трёх присоединённых углов  обеспечивают требуемое расположение руки (первых трёх звеньев), а углы
обеспечивают требуемое расположение руки (первых трёх звеньев), а углы  обеспечивают заданную ориентацию схвата. Для первых трёх присоединённых углов существует 4 решения: два - для манипулятора с левосторонней конфигурацией и два – с правосторонней. Для каждой конкретной конфигурации манипулятора равенства (7-18), (7-26),
обеспечивают заданную ориентацию схвата. Для первых трёх присоединённых углов существует 4 решения: два - для манипулятора с левосторонней конфигурацией и два – с правосторонней. Для каждой конкретной конфигурации манипулятора равенства (7-18), (7-26),
(8-7), (8-15), (8-17), (8-19) дают решение  обратной задачи кинематики, причем
обратной задачи кинематики, причем  также является решением этой задачи (если ПЕРЕКЛЮЧАТЕЛЬ «включен»).
также является решением этой задачи (если ПЕРЕКЛЮЧАТЕЛЬ «включен»).
Дата добавления: 2021-11-16; просмотров: 655;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Здания для проживания людей
- III. Тесты для самоконтроля студентов
- III. ТРЕБОВАНИЯ РКФ ДЛЯ ДОПУСКА СОБАК В ПЛЕМЕННОЕ РАЗВЕДЕНИЕ
- IV. Сложнолегированные сплавы для горячего изостатического прессования (ГИП).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
