Уравнения состояния и выхода соединений
Как следует из разд. 1.2.1, многомерная система, описываемая уравнениями состояния и выхода, полностью характеризуется набором трех матриц:  ,
,  ,
,  . Здесь и далее аргумент
. Здесь и далее аргумент  для сокращения записи опущен. Две многомерные системы могут образовывать три типа соединений: параллельное, последовательное и с обратной связью, изображенные на рис. 1.17,а — в.
для сокращения записи опущен. Две многомерные системы могут образовывать три типа соединений: параллельное, последовательное и с обратной связью, изображенные на рис. 1.17,а — в.
Предполагается, что обе системы, образующие соединения, описываются в пространстве состояний соотношениями:
 ,
,  , (1.38)
, (1.38)
 ,
,  , (1.39)
, (1.39)
где  ,
,  ,
,  — векторы состояния, входного сигнала и выхода первой системы размерности
— векторы состояния, входного сигнала и выхода первой системы размерности  ,
,  ,
,  соответственно;
соответственно;  ,
,  ,
,  — векторы состояния, входного сигнала и выхода второй системы, размерности которых
— векторы состояния, входного сигнала и выхода второй системы, размерности которых  ,
,  ,
,  соответственно.
соответственно.
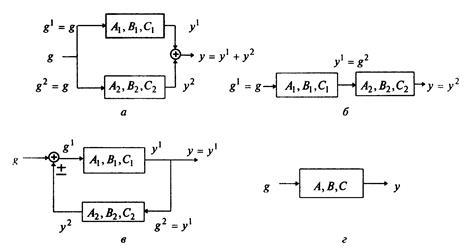
Рис. 1.17
Требуется заменить соединение эквивалентной системой, описываемой уравнениями (1.35), (1.37) и изображенной на рис. 1.17, г, в которой  ,
,  ,
,  —размерности векторов состояния
—размерности векторов состояния  , входного сигнала
, входного сигнала  и выхода
и выхода  .
.
1. Параллельное соединение (рис. 1.17, а). Условия соединения:
 ,
,  ,
,  ,
,  .
.
Перепишем соотношения (1.38), (1.39) с учетом того, что :
 ,
,  (1.40)
(1.40)
Полагая  ,
,  и сравнивая с (1.35), (1.37), получаем матрицы
и сравнивая с (1.35), (1.37), получаем матрицы
 ,
,  ,
, 
эквивалентной системы размера  ,
,  ,
,  соответственно.
соответственно.
Пример 1.18. Системы, образующие параллельное соединение, описываются уравнениями:
первая система:
 ,
,  ,
,
где  ,
,  ,
,  ;
;
вторая система:
 ,
,  ,
,
где  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Требуется записать уравнение эквивалентной системы.
□ Условия соединения  ,
,  выполняются. Согласно (1.40) эквивалентная система имеет вид
выполняются. Согласно (1.40) эквивалентная система имеет вид
 ,
,  ,
,
где  ,
,  ,
,  .
.
2. Последовательное соединение (рис. 1.17,б). Условие соединения  ,
,  . В первом соотношении (1.39) учтем, что
. В первом соотношении (1.39) учтем, что  , а из сравнения рис. 1.17,б и 1.17,г, получаем:
, а из сравнения рис. 1.17,б и 1.17,г, получаем:  ,
,  ,
,  ,
,  . Эквивалентная система имеет вид
. Эквивалентная система имеет вид
 ,
,  (1.41)
(1.41)
Полагая матрицы , и сравнивая с (1.35), (1.37), получаем
 ,
,  ,
, 
эквивалентной системы размера , ,  соответственно.
соответственно.
Пример 1.19. Системы, образующие последовательное соединение, описываются уравнениями: первая система:
 ,
,  ,
,
где ,  ,
,  ,
,  ,
,  ,
,  ;
;
вторая система:
 ,
,  ,
,
где  , , .
, , .
Требуется записать уравнения эквивалентной системы.
□ Условие соединения  выполняется. Согласно (1.41) эквивалентная система имеет вид
выполняется. Согласно (1.41) эквивалентная система имеет вид
 ,
,  ,
,
где ,  ,
,  ,
,  .
.
3. Соединение с обратной связью (рис. 1.17, в). Условия соединения:  , ,
, ,  , . В первом соотношении (1.38) положим
, . В первом соотношении (1.38) положим  , а в первом уравнении (1.39)
, а в первом уравнении (1.39)  . Сравнивая рис. 1.17, в и 1.17, г, получаем
. Сравнивая рис. 1.17, в и 1.17, г, получаем  . Эквивалентная система имеет вид
. Эквивалентная система имеет вид
 ,
,  . (1.42)
. (1.42)
Полагая  , и сравнивая с (1.35), (1.37), получаем матрицы
, и сравнивая с (1.35), (1.37), получаем матрицы
 ,
,  ,
, 
эквивалентной системы размера , , соответственно. Знак «плюс» — для положительной, а знак «минус» — для отрицательной обратной связи.
Пример 1.20. Системы, образующие соединение с отрицательной обратной связью, описываются уравнениями первая система
 ,
,  ,
,
где  ,
,  , ;
, ;
вторая система:
 ,
,  ,
,
где , , .
Требуется записать уравнения жвивалентной системы.
□ Условия соединения ,  выполняются. Согласно (1.42) эквивалентная система имеет вид
выполняются. Согласно (1.42) эквивалентная система имеет вид
 ,
,  ,
,
где  ,
,  ,
,  .
.
Дата добавления: 2017-09-01; просмотров: 1430;
Поиск по сайту
Узнать еще
- C.) Опытным путем (по времени выхода забойной пачки).
- I. Достижение состояния покоя и расслабления
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА
- III. Расчёт электрического состояния цепи с последовательным соединением элементов L, R, C.
- Агрегатные состояния
- Агрегатные состояния
- Агрегатные состояния

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
