Уравнение взаимного ориентирования пары снимков
По условию взаимного ориентирования пары снимков необходимо, чтобы для любой точки М (рис. 39 и 40) векторы  лежали в одной плоскости, т.е. выполнялось условие компланарности трёх векторов
лежали в одной плоскости, т.е. выполнялось условие компланарности трёх векторов
| (81) |
В координатной форме это условие выражается равенством нулю определителя третьего порядка, составленного из координат векторов:  (составляющих базиса фотографирования Bx , By , Bz),
(составляющих базиса фотографирования Bx , By , Bz),  , (координат
, (координат  ) и
) и  (координат
(координат  ):
):
| (82) |
Определитель (82), записанный на основе условия компланарности, может быть получен из решения уравнений коллинеарности (27), записанных для одной и той же точки местности, изобразившейся на паре снимков, полученных с точек фотографирования S1 и S2.
В соответствии с этими уравнениями, связи между координатами точки местности X, Y, Z и координатами её изображения на левом  и правом снимках имеют следующий вид:
и правом снимках имеют следующий вид:
Поэтому:


Решив первое (или второе) уравнение относительно Z и подставив результат во второе (или первое) уравнение, после преобразований запишем:

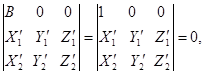
Так как,  то полученное уравнение является результатом разложения определителя (82) по элементам первой строки.
то полученное уравнение является результатом разложения определителя (82) по элементам первой строки.
Условие (82) не нарушается, если вектор  заменить коллинеарным вектором
заменить коллинеарным вектором  .Эта замена равноценна изменению масштаба модели местности.
.Эта замена равноценна изменению масштаба модели местности.
Запишем уравнение (82) для двух рассмотренных систем элементов взаимного ориентирования пары снимков.
При использовании первой системы составляющие базиса фотографирования By = Bz = 0, a Bx = B, поэтому:
или
| (83) |
А с учетом формул (15):

| (84) |
где x1, y1 и x2, y2 – координаты соответственных точек на левом и правом снимках;  - направляющие косинусы матрицы преобразования координат левого снимка;
- направляющие косинусы матрицы преобразования координат левого снимка;  - то же правого снимка.
- то же правого снимка.
Направляющие косинусы вычисляют по формулам (18) с использованием угловых элементов  для левого снимка и
для левого снимка и  для правого.
для правого.
Для второй системы элементов согласно рис. 40
| (85) |
Поэтому определитель (82) имеет вид:
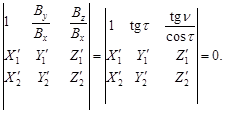
| (86) |
В результате его разложения по элементам первой строки получим:
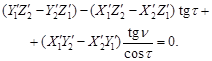
| (87) |
Как и в первом случае, координаты  можно вычислить по формулам (15) и (18), приняв
можно вычислить по формулам (15) и (18), приняв  для левого снимка и
для левого снимка и  - для правого.
- для правого.
Воспользуемся формулой (15) и заменим пространственные координаты  плоскими координатами точек пары снимков. При этом учтём, что
плоскими координатами точек пары снимков. При этом учтём, что  В результате получим:
В результате получим:
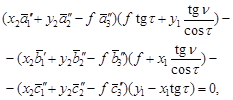
| (88) |
где  - направляющие косинусы матрицы преобразования координат правого снимка.
- направляющие косинусы матрицы преобразования координат правого снимка.
Уравнения (84) и (88) справедливы для любых значений элементов взаимного ориентирования. Для плановых снимков можно использовать их приближенный вариант. Так, на основании зависимостей (21) с точностью до членов первого порядка малости для первой системы элементов (верхняя строчка для левого снимка, нижняя – для правого) имеем:
| a1'= b2'= c3'=1, a2'=- b1'=-κ1' a3'=- c1'=α1' b3'= c2'=0 | (89) |
| a1"= b2"= c3"=1 a2"=- b1"=-κ2" a3"=- c1"=α2" b3"= c2"=ω2 |
для второй системы элементов:
| a1'= b2'= c3'=1, a2'= a3' =b1'= b3' = c1'=c2'=0 | (90) |
| a1"= b2"= c3"=1 a2"=- b1"=-Δκ a3"=- c1"=Δα b3"= c2"=Δω |
Подставив указанные выше значения направляющих косинусов соответственно в уравнения (84) и (88), после преобразований получим:
для первой системы элементов –

| (91) |
для второй –

| (92) |
где

| (93) |
Величина q называется поперечным параллаксом.
В коэффициентах при элементах взаимного ориентирования принято,  так как для плановых снимков это существенно не влияет на точность результата.
так как для плановых снимков это существенно не влияет на точность результата.
Из формул (91) и (92) видно, что если элементы взаимного ориентирования, равны нулю, то поперечный параллакс q во всех точках ориентирования отсутствует.
Дата добавления: 2017-05-02; просмотров: 1798;
Поиск по сайту
Узнать еще
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА
- I.1.6 ОСНОВНОЕ УРАВНЕНИЕ КИНЕТИЧЕСКОЙ ТЕОРИИ ГАЗОВ. ЗАКОН РАВНОМЕРНОГО РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ ПО СТЕПЕНЯМ СВОБОДЫ
- I.3.1 УРАВНЕНИЕ ВАН-ДЕР-ВААЛЬСА
- I.6.3 ДВИЖЕНИЕ ЖИДКОСТЕЙ И ГАЗОВ. УРАВНЕНИЕ БЕРНУЛЛИ
- А). Измерение на карте углов ориентирования
- Автоматизация обработки снимков на фотограмметрическом оборудовании
- Автоматизированная тематическая обработка радиолокационных снимков.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
