Тележек крановых мостов
Эти механизмы состоят из электродвигателя, промежуточных передач, ходовой части с приводными и неприводными ходовыми колесами. Основные схемы механизмов передвижения представлены на рис. 2.1. В современных кранах механизмы передвижения различаются применением привода с редуктором; использованием ходовых колес со съемными буксами; соединением валов, в том числе быстроходных, в основном зубчатыми муфтами, не требующими высокой точности сборки. Наиболее типичными для механизма передвижения тележки являются приводы с центральным расположением редуктора. Механизмы передвижения тележек, как правило, имеют центральный привод с тихоходным трансмиссионным валом. Пример такой схемы показан на рис. 2.1, а. Число ходовых колес тележек зависит от грузоподъемности. При грузоподъемности до 160 т предварительно можно принимать четыре колеса, при большей грузоподъемности - восемь. Предпочтительно расположение редуктора посередине между приводными ходовыми колесами. При этом обе половины трансмиссионного вала закручиваются под нагрузкой на одинаковый угол, что способствует одновременному началу движения приводных колес и ликвидации перекосов. Тем не менее в тележках применяется и схема с боковым расположением редуктора, достоинство которого - удобство монтажа редуктора. В этих схемах используют навесные редукторы.
Общий вид схемы с навесным редуктором представлен на рис. 2.2. К навесному редуктору 2 этого механизма прикреплен фланцевый электродвигатель 1, крутящий момент от которого через зубчатые передачи передается на полый выходной вал 5 и от него на валы приводных ходовых колес 9. Второе приводное колесо соединено с валом первого уравнительным трансмиссионным валом 6 с двумя зубчатыми полумуфтами 7. Тормозной шкив 4 тормоза 3, установленного на кронштейне 5, закреплен на промежуточном или на быстроходном валу редуктора. Реактивный момент, возникающий при движении тележки, воспринимается через
корпус редуктора упорными болтами 10. Для механизма передвижения с навесным редуктором не требуются специальные опорные стойки на раме тележки под редуктор и электродвигатель. Кроме того, этот механизм передвижения отличается компактностью и простотой установки. Однако при замене приводных колес на этом механизме необходимо демонтировать редуктор, что усложняет ремонт. Применение механизмов с навесным редуктором нецелесообразно для тележек большой грузоподъемности (более 20 т), так как в этом случае размеры и масса навесного редуктора возрастают непропорционально и становятся неприемлемыми.
Рис. 2.1. Схемы механизмов передвижения
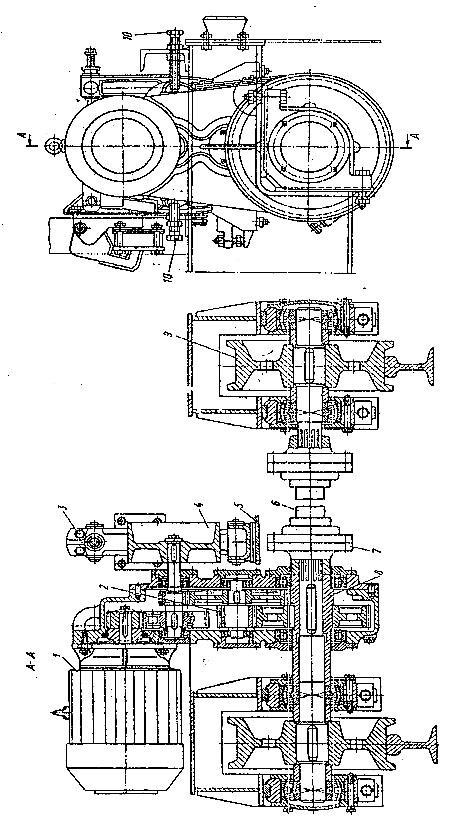
Рис. 2.2. Механизм передвижения
Механизмы передвижения моста выполняются с центральным (см. рис. 2.1, б) или раздельным приводами (см. рис. 2.1, в). При центральном расположении привода для уменьшения перекоса крана электродвигатель установлен примерно в средней части моста. На приводные ходовые колеса вращение передается через трансмиссионный вал. В раздельном приводе для каждого приводного ходового колеса или группы приводных ходовых колес имеется индивидуальный электродвигатель. Механизмы передвижения с центральным расположением привода могут быть выполнены с тихоходным, среднёходным и быстроходным трансмиссионными валами.
Грузоподъемность, пролет и тип металлоконструкции моста, а также тип крана оказывают существенное влияние на выбор схемы механизма передвижения. В качестве исходных данных должны быть заданы: скорость передвижения V, м/с; режим работы механизма по правилам [29]; пролет крана Lк, м; условия работы крана (в закрытом помещении или на открытом воздухе и др.); график загрузки механизма. Остальные исходные данные (грузоподъемность, род тока, срок службы, тип машины) те же, что были и при проектировании механизма подъема груза.
В механизмах передвижения однобалочных мостовых кранов встречается привод с центральным расположением редуктора и открытыми зубчатыми передачами на колеса. При этом уменьшаются масса и габариты редуктора. При такой схеме легче реализовать большое передаточное число механизма. В механизмах передвижения двухбалочных кранов независимо от места их работы и однобалочных кранов, предназначенных для работы на открытом воздухе, применяют, как правило, раздельный привод. Он легок и удобен в изготовлении и монтаже. Однако при раздельном приводе несинхронность движения сторон крана больше, чем при центральном. Рекомендуется [2] при пролетах меньше 16 м применять только центральный привод. Для удобства обслуживания тормозов их можно располагать на вторых концах валов двигателей. Различные кинематические схемы приведены в [2, 18, 22] и др.
Особенности расчета механизмов передвижения ходовых тележек козловых кранов рассмотрены в книге [1]. Здесь рассмотрены расчеты механизмов передвижения мостовых кранов и их тележек, получивших наибольшее распространение во внутризаводском транспорте.
Предварительно число ходовых колес крана можно принять в зависимости от грузоподъемности. При числе ходовых колес 16 число приводов может быть равно 2. В механизмах передвижения однобалочных мостовых кранов опорного типа, предназначенных для работы в помещении, применяют, как правило, центральный привод механизма передвижения.
Дата добавления: 2017-04-05; просмотров: 2508;
Поиск по сайту
Узнать еще
- Балки мостов автомобилей
- Балки мостов автомобиля КамАЗ-43114
- Балки мостов автомобиля Урал-4320-31
- Береговые опоры железобетонных мостов. Сопряжение мостов с насыпью.
- Бетон для железобетонных мостов
- В) Вертикальные давления колес мостовых кранов
- Ветровая, ледовая нагрузка от навала судов, учитываемая при проектировании мостов.
- Висячих и вантовых мостов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
