Скоростная девиация гироскопического компаса
При работе ГК на судне, движущемся с постоянной скоростью, его главная ось, как правило, не устанавливается в истинный меридиан, а составляет с ним некоторый угол, который образует его скоростную девиацию. Для оценки величины указанной девиации обратимся к уравнениям (2.20 [16]) движения гироскопа с тремя степенями свободы, в которых учтем, что в рассматриваемом случае угловые скорости базовой системы координат определяются равенствами (2.38 [16]). Одновременно учтем, что при отсутствии демпфирующего устройства моменты внешних сил, приложенных к гироскопу, соответствуют ранее рассмотренному случаю. В этих условиях указанные уравнения без учета членов, определяющих нутационные колебания главной оси гироскопа, примут вид:
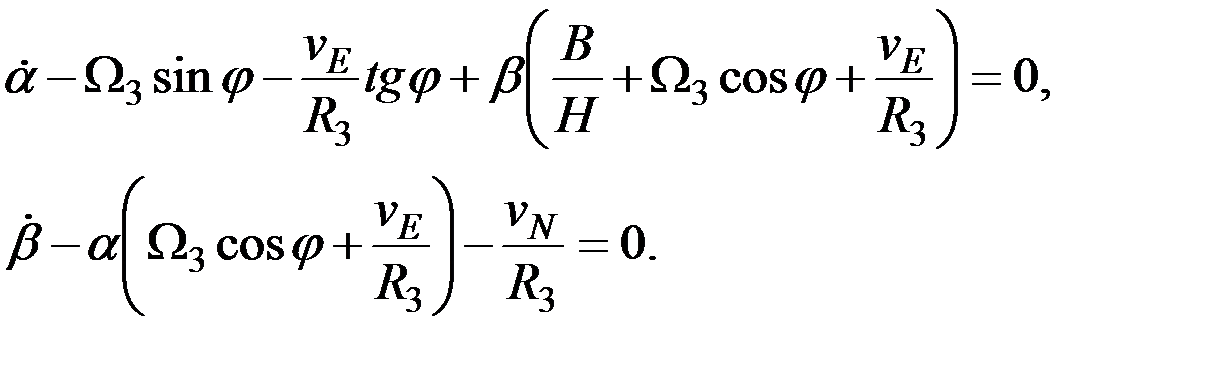 (1.19)
(1.19)
На практике всегда имеет место неравенство  >>
>>  , что позволяет уравнения (1.19) переписать в более простой форме:
, что позволяет уравнения (1.19) переписать в более простой форме:
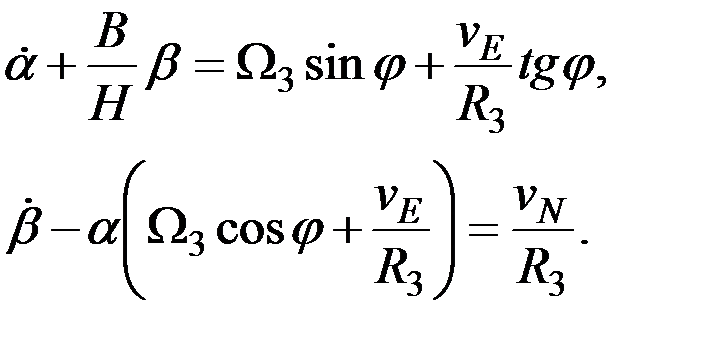 (1.20)
(1.20)
Общие решения однородной системы уравнений
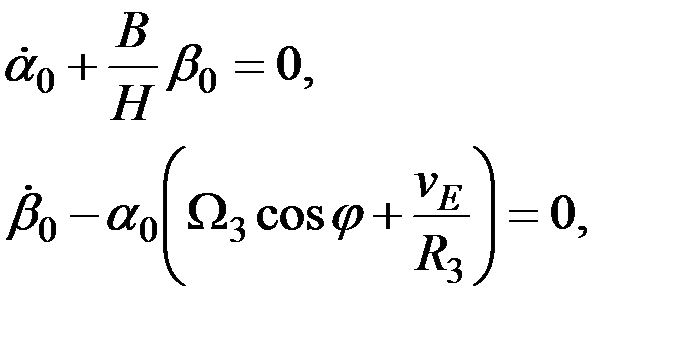 (1.21)
(1.21)
соответствующей системе (1.20), по аналогии с решениями (1.8) и (1.9) системы (1.5) может быть записано в виде:

 . (1.22)
. (1.22)
Здесь частота  прецессионных колебаний главной оси гироскопа определяется следующим равенством:
прецессионных колебаний главной оси гироскопа определяется следующим равенством:
 . (1.23)
. (1.23)
Последнее равенство показывает, что значение n зависит от восточной составляющей скорости судна. В общем случае при движении судна в средних широтах это обстоятельство является несущественным, так как практически не влияет на качество работы ГК. Однако при движении судна на западных курсах в высоких широтах выражение в скобках может оказаться близким к нулю. Это значит, что период колебаний ГК станет недопустимо большим и использовать его в навигационных целях станет невозможно. Широта, в которой имеет место равенство  и
и  , поучила название критической широты. Для обычных транспортных судов она превышает 800.
, поучила название критической широты. Для обычных транспортных судов она превышает 800.
Определим частные решения системы (1.20), характеризующие положение главной оси гироскопа после прекращения всех переходных процессов (в данном случае положение центра колебаний оси).
 (1.24)
(1.24)
Выражения (1.22) и (1.24) позволяют записать равенства, определяющие закон изменения углов отклонения главной оси от плоскостей меридиана и горизонта:

 . (1.25)
. (1.25)
Произвольные постоянные при ранее принятых начальных значениях углов  и
и  будут равны:
будут равны:
 (1.26)
(1.26)
Опустим из рассмотрения гармонические составляющие полученных решений, так как при использовании систем демпфирования указанных колебаний они станут равными нулю, и проанализируем лишь установившиеся отклонения главной оси от плоскости горизонта и меридиана, определяемые равенствами (1.24).
 Как и ранее (1.15), наличие угла β обеспечивает вращение гироскопа вокруг наружной оси подвеса с такой скоростью
Как и ранее (1.15), наличие угла β обеспечивает вращение гироскопа вокруг наружной оси подвеса с такой скоростью  (рис. 2.20 [16]), с которой вращается вокруг местной вертикали плоскость местного меридиана (полуденная линия). Значение этой скорости определяется равенством (2.38 [16]). Здесь, в отличие от случая работы ГК на неподвижном судне (2.32 [16]), появляется дополнительная составляющая
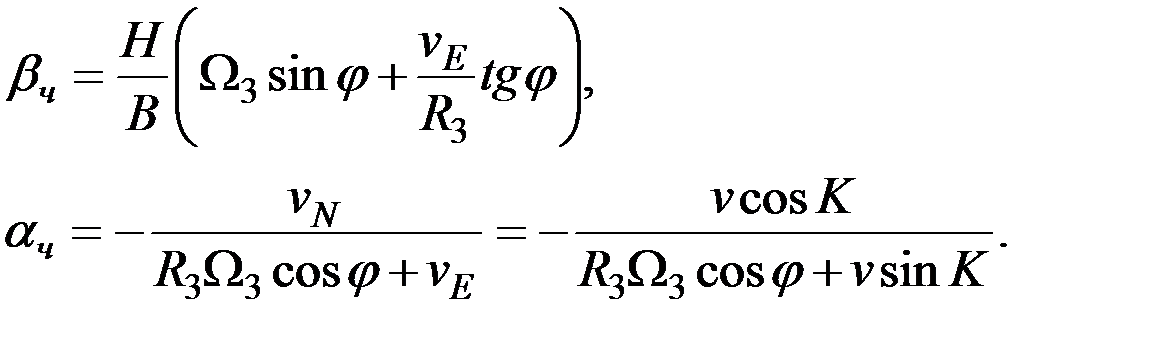
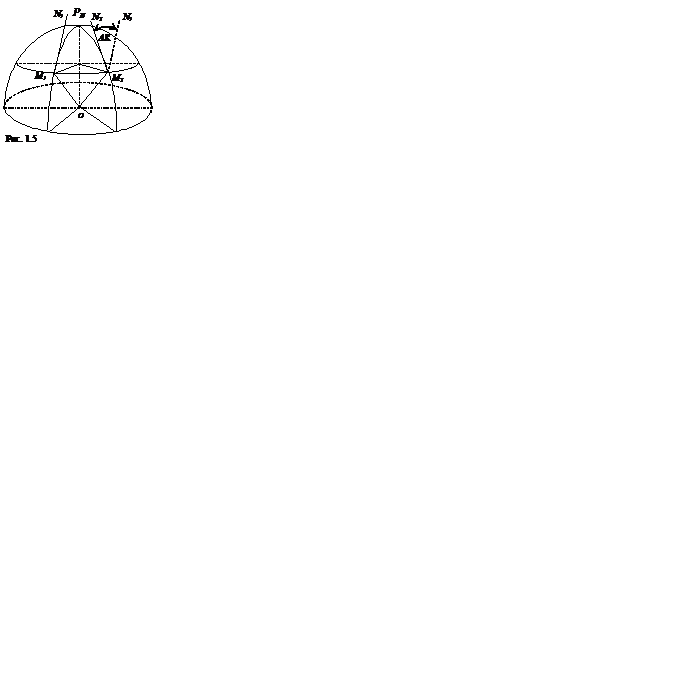
(рис. 2.20 [16]), с которой вращается вокруг местной вертикали плоскость местного меридиана (полуденная линия). Значение этой скорости определяется равенством (2.38 [16]). Здесь, в отличие от случая работы ГК на неподвижном судне (2.32 [16]), появляется дополнительная составляющая  , обусловленная явлением сходимости меридианов. Действительно, при перемещении судна в восточном или западном направлениях, например, из точки М1 (рис. 1.5) в точку М2, в силу наличия указанной сходимости даже в том случае, если Землю считать неподвижной в пространстве, происходит изменение азимутальной ориентации местного меридиана на угол ΔΚ. Скорость
, обусловленная явлением сходимости меридианов. Действительно, при перемещении судна в восточном или западном направлениях, например, из точки М1 (рис. 1.5) в точку М2, в силу наличия указанной сходимости даже в том случае, если Землю считать неподвижной в пространстве, происходит изменение азимутальной ориентации местного меридиана на угол ΔΚ. Скорость  изменения этого угла нашла свое отражение в равенстве (1.25).
изменения этого угла нашла свое отражение в равенстве (1.25).
 Выражение для
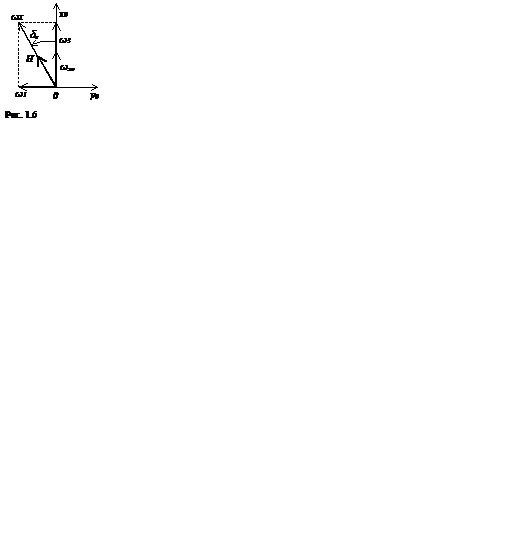
Выражение для  (1.24) определяет величину скоростной девиации ГК. Причина появления скоростной девиации имеет простое физическое объяснение. Как было установлено в предыдущем параграфе, главная ось ГК, принудительно удерживаемая в плоскости горизонта, стремится совместиться с горизонтальной составляющей вектора угловой скорости вращения этой плоскости в пространстве. При неподвижном относительно земной поверхности положении ГК плоскость горизонта вращается лишь вокруг оси ох0 (рис. 1.6) с угловой скоростью
(1.24) определяет величину скоростной девиации ГК. Причина появления скоростной девиации имеет простое физическое объяснение. Как было установлено в предыдущем параграфе, главная ось ГК, принудительно удерживаемая в плоскости горизонта, стремится совместиться с горизонтальной составляющей вектора угловой скорости вращения этой плоскости в пространстве. При неподвижном относительно земной поверхности положении ГК плоскость горизонта вращается лишь вокруг оси ох0 (рис. 1.6) с угловой скоростью  (2.32 [16]). Как это следует из рис. 2.20 [16], при работе ГК на судне, движущемся курсом К со скоростью v, угловая скорость вращения плоскости горизонта складывается из трех составляющих: упомянутой составляющей
(2.32 [16]). Как это следует из рис. 2.20 [16], при работе ГК на судне, движущемся курсом К со скоростью v, угловая скорость вращения плоскости горизонта складывается из трех составляющих: упомянутой составляющей  , составляющей
, составляющей  , определяемой равенством (2.37 [16]) и составляющей
, определяемой равенством (2.37 [16]) и составляющей  , определяемой равенством (2.35 [16]). Взаимная ориентация указанных векторов на плоскости горизонта показана на рис. 1.6. Из рисунка следует, что вектор результирующей угловой скорости ωΣ вращения плоскости горизонта повернут относительно направления на север на угол δv, величина которого определяется следующим равенством:
, определяемой равенством (2.35 [16]). Взаимная ориентация указанных векторов на плоскости горизонта показана на рис. 1.6. Из рисунка следует, что вектор результирующей угловой скорости ωΣ вращения плоскости горизонта повернут относительно направления на север на угол δv, величина которого определяется следующим равенством:
 . (1.27)
. (1.27)
Совместившись с направлением вектора ωΣ, который определяет положение компасного меридиана,главная ось гироскопа окажется повернутой относительно направления на север (истинного меридиана) на величину, определяемую тождественными равенствами (1.24) и (1.27).
Проведенный анализ показывает, что
§ 
| Важно! |
§ значение скоростной девиации не зависит от параметров гирокомпаса, а определяется только скоростью движения судна, его курсом и широтой места, в котором оно находится;
§ при одних и тех же параметрах движения судна скоростная девиация растет с увеличением широты его места и может достигать значительных величин в высоких широтах;
§ если судно идет курсом 900 или 2700, скоростная девиация компаса равна нулю;
§ в общем случае скоростная девиация должна или учитываться в процессе плавания, или компенсироваться.
На практике используются два принципиально различных способа компенсации скоростной девиации. В первом, главная ось ГК оставляется в плоскости компасного меридиана, а в показания датчиков информации (репитеров) вносятся соответствующие поправки. Во втором, гироскоп принудительно приводится в истинный меридиан, в результате чего отпадает необходимость введения поправок в показания репитеров. Особенности использования указанных видов коррекции будут рассмотрены ниже
Дата добавления: 2017-02-13; просмотров: 5640;
Поиск по сайту
Узнать еще
- Анализ уравнений двухгироскопного компаса
- ВЛИЯНИЕ ГИРОСКОПИЧЕСКОГО МОМЕНТА ВОЗДУШНОГО ВИНТА
- Влияние маневрирования судна на работу двухгироскопного компаса
- Высокоскоростная передача данных в стандарте UMTS
- Высокоскоростная передача данных по коммутируемым каналам. Технология HSCSD
- Девиация магнитного компаса
- Девиация магнитного компаса
- Девиация магнитного компаса. Компасные направления.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
