Динамически настраиваемый гироскоп
Ранее были рассмотрены свойства гироскопов, построенных по классической схеме, предусматривающей установку ротора во внешнем кардановом подвесе, имеющим опоры с минимальным моментом сил сухого трения. На практике же существуют и другие варианты подвеса ротора гироскопа, которые имеют свои особенности и область применения. Один из таких вариантов использован в динамически настраиваемом гироскопе (ДНГ).

| В |
Ротор Р3 ДНГ (рис.2.27) [43], устанавливается в упругом внутреннем кардановом подвесе, включающем в себя два кольца Р1 и Р2, связанных с ним с помощью четырех торсионов Т1 – Т4, имеющих высокую жесткость при изгибе и определенную, заранее заданную жесткость при закручивании. Благодаря торсионам ротор может поворачиваться на ограниченные углы вокруг осей оу’ и oz’. Кольца подвеса в нерабочем состоянии располагаются практически в одной плоскости.
Ротор совместно с системой его подвеса приводится во вращение с угловой скоростью Ω с помощью внешнего двигателя (на рис. не показан), связанного с валом В, ось которого совпадает с осью ох0.
Исследуем особенности работы описанной конструкции гироскопа, принимая во внимание, что он фактически является системой трех связанных между собой роторов, два из которых имеют неравные главные экваториальные моменты инерции. Последнее обстоятельство затрудняет рассмотрение поведения гироскопа на основе чисто физических соображений.
Принцип действия волнового твердотельного гироскопа
Существуют и иные варианты построения безроторных гироскопов, способных обеспечивать измерение параметров движения объектов, на которых они работают. Наиболее перспективным из них в настоящее время считается волновой твердотельный гироскоп (ВТГ). Приборы указанного типа интенсивно разрабатываются многими научными коллективами как в России, так и за рубежом. В своем докладе [34] академик В.Г. Пешехонов отметил: “Можно ожидать, что в следующем десятилетии будут реализованы потенциальные возможности ВТГ – устойчивость к внешним воздействиям, высокая точность (10-3 град/час), высокая надежность и возможность автоматизированного серийного производства, и это позволит новому типу гироскопа вытеснить в ряде применений не только ЛГ (лазерные гироскопы), но и некоторые другие типы гироскопов. Первый практический успех уже достигнут. Фирмой Delko (ныне подразделение фирмы Litton) создан интегрирующий ВТГ с высокими точностными характеристиками.” К указанным в приведенной цитате достоинствам рассматриваемого прибора следует добавить [29] малое потребление энергии, конструктивную простоту механических узлов, устойчивость к прерыванию электропитания, малое время готовности, широкий диапазон рабочих температур, устойчивость к воздействиям ионизирующего излучения, малую чувствительность к линейным перегрузкам, большой срок службы.
Принцип действия ВТГ основан на инертности упругих волн, возбуждаемых в кольцевом, цилиндрическом или полусферическом резонаторах, при его вращении вокруг оси симметрии. Впервые это явление обнаружил и исследовал английский ученый G. Bryan. В 1890 г. он, исследуя природу звуковых биений вибрирующей оболочки (рюмки) при вращении ее вокруг
оси симметрии, установил, что в результате действия кориолисовых сил инерции происходила прецессия стоячей волны как относительно оболочки, так и в инерциальном пространстве. Физическую сущность указанного явления можно пояснить следующим образом. Допустим [29], что в кольцевом резонаторе (рис. 2.33 а) возбуждены колебания, имеющие форму стоячей волны, пучности которой находятся в точках 1,3,5 и 7, а узлы в точках 2,4,6, и 8. При вращении полусферы вокруг оси симметрии с угловой скоростью Ω точки 1,3,5 и 7 (рис. 2.33 б) совершают сложное движение, состоящее из относительного - со скоростями V1, V3, V5 и V7 и пере 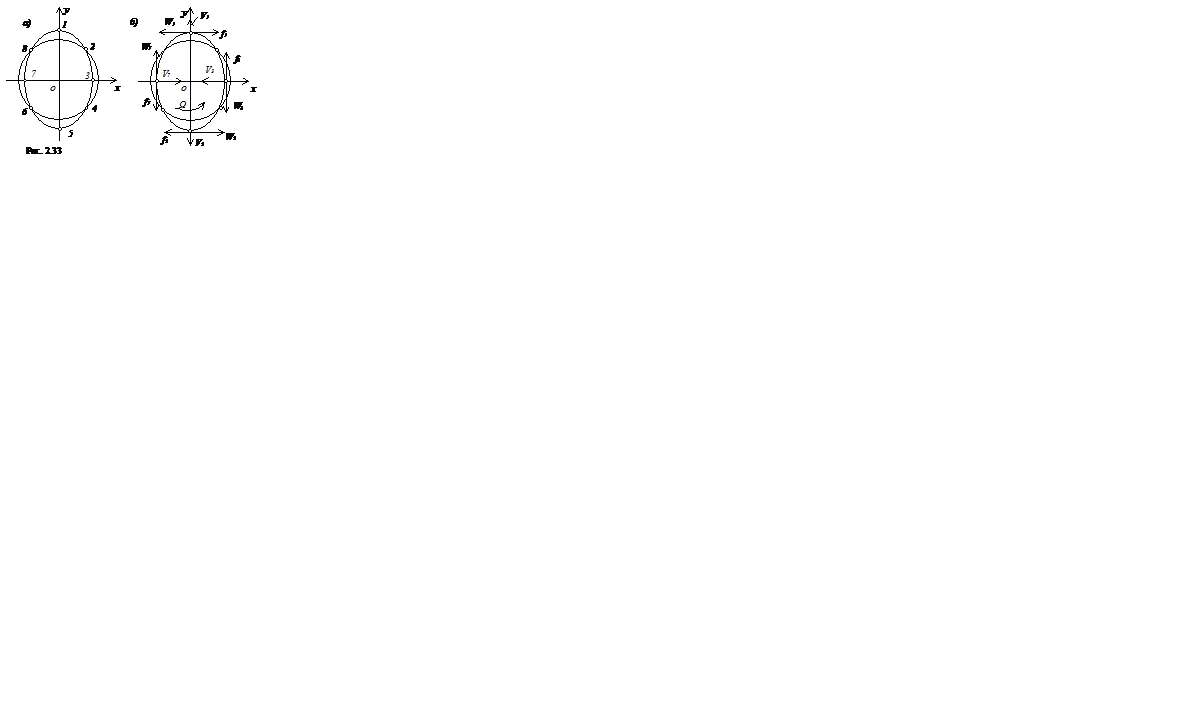 носного – с угловой скоростью Ω. В результате возникают кориолисовы ускорения W1, W3, W5 и W7 элементов резонатора, расположенных в точках пучностей. Силы инерции f1, f3, f5 и f7, порождаемые этими ускорениями, будут направлены в стороны, противоположные ускорениям, и образовывать два противоположно направленных момента кориолисовых сил, величина которых зависит от угловой скорости Ω и амплитуды вибрации резонатора. Результирующий момент названных сил вызывает
носного – с угловой скоростью Ω. В результате возникают кориолисовы ускорения W1, W3, W5 и W7 элементов резонатора, расположенных в точках пучностей. Силы инерции f1, f3, f5 и f7, порождаемые этими ускорениями, будут направлены в стороны, противоположные ускорениям, и образовывать два противоположно направленных момента кориолисовых сил, величина которых зависит от угловой скорости Ω и амплитуды вибрации резонатора. Результирующий момент названных сил вызывает 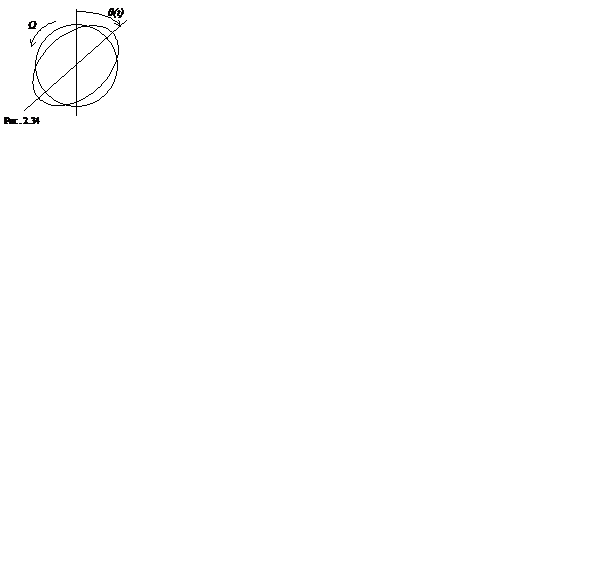 указанную выше прецессию стоячей волны относительно резонатора и в инерциальном пространстве. В зависимости от способа возбуждения стоячей волны угол прецессии θ(t) (рис. 2.34) оказывается пропорциональным или угловой скорости вращения основания прибора, или углу его поворота. В первом случае прибор относится к измерителям угловой скорости (датчикам угловой скорости ВТГ-ДУС), а во втором – к измерителям угла поворота основания (интегрирующим гироскопам ВТГ-ИГ). Возбуждение указанных колебаний осуществляется с помощью емкостных, электромагнитных или пьезоэлектрических датчиков. В первых двух случаях между резонатором и электродами датчиков имеются рабочие зазоры, в последнем – датчики монтируются на самом цилиндре. Применение пьезоэлектрических датчиков существенно упрощает конструкцию прибора и позволяет получить большие выходные сигналы.
указанную выше прецессию стоячей волны относительно резонатора и в инерциальном пространстве. В зависимости от способа возбуждения стоячей волны угол прецессии θ(t) (рис. 2.34) оказывается пропорциональным или угловой скорости вращения основания прибора, или углу его поворота. В первом случае прибор относится к измерителям угловой скорости (датчикам угловой скорости ВТГ-ДУС), а во втором – к измерителям угла поворота основания (интегрирующим гироскопам ВТГ-ИГ). Возбуждение указанных колебаний осуществляется с помощью емкостных, электромагнитных или пьезоэлектрических датчиков. В первых двух случаях между резонатором и электродами датчиков имеются рабочие зазоры, в последнем – датчики монтируются на самом цилиндре. Применение пьезоэлектрических датчиков существенно упрощает конструкцию прибора и позволяет получить большие выходные сигналы.
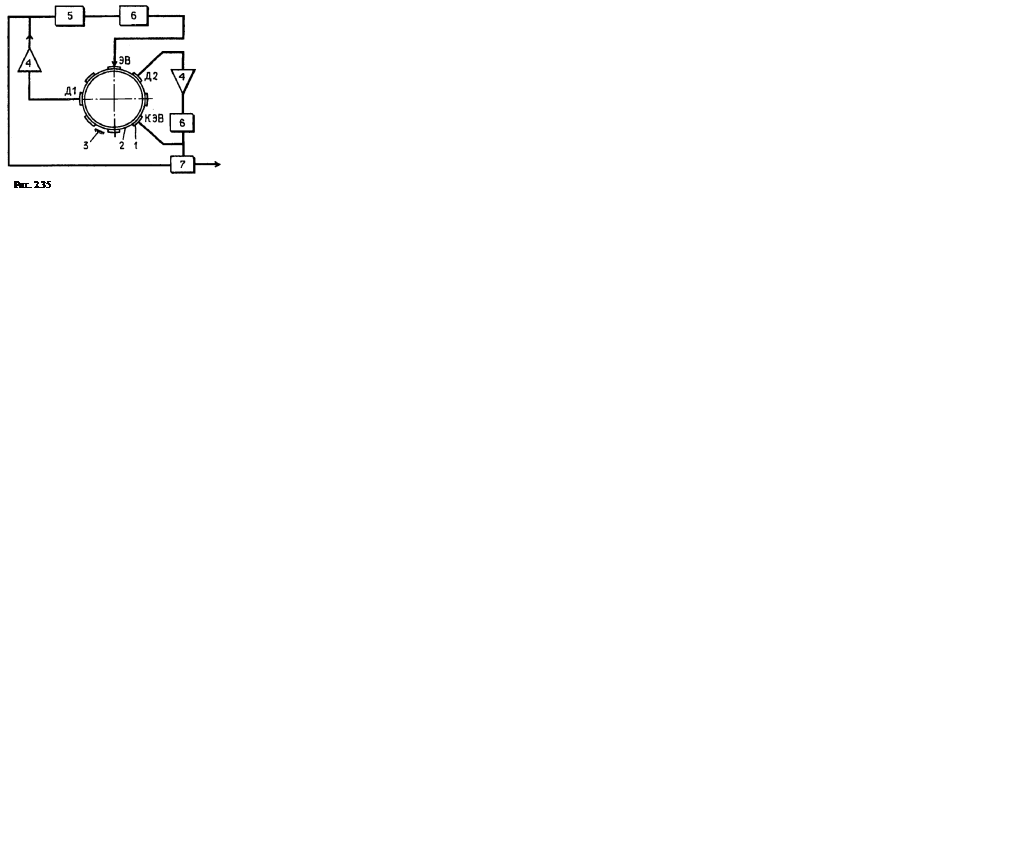 В приборах типа ВТГ-ДУС используется позиционное возбуждение колебаний резонатора. Один из возможных вариантов реализации схемы, обеспечивающей такое возбуждение, представлен на рис. 2.35 [29]. Возбуждающая сила, приложенная к кромке резонатора 2 со стороны двух диаметрально противоположных электродов возбуждения ЭВ, порождает описанную выше стоячую волну, изменяющуюся с частотой, равной собственной частоте резонатора. Для обеспечения точной настройки системы используется напряжение, снимаемое с дифференциального датчика Д1, которое управляет работой автогенератора, включающего в себя предварительный усилитель 4, схему стабилизации амплитуды и фазовой синхронизации 5, широкополосный фильтр 6 и электрод ЭВ. В случае отсутствия вращения прибора вокруг оси чувствительности стоячая волна имеет неподвижные узлы, расположенные под парами электродов Д2 и КЭВ. Электроды Д2 используются для измерения амплитуды колебаний резонатора в точках, с которыми они связаны, а электроды КЭВ – для компенсации этих колебаний.
В приборах типа ВТГ-ДУС используется позиционное возбуждение колебаний резонатора. Один из возможных вариантов реализации схемы, обеспечивающей такое возбуждение, представлен на рис. 2.35 [29]. Возбуждающая сила, приложенная к кромке резонатора 2 со стороны двух диаметрально противоположных электродов возбуждения ЭВ, порождает описанную выше стоячую волну, изменяющуюся с частотой, равной собственной частоте резонатора. Для обеспечения точной настройки системы используется напряжение, снимаемое с дифференциального датчика Д1, которое управляет работой автогенератора, включающего в себя предварительный усилитель 4, схему стабилизации амплитуды и фазовой синхронизации 5, широкополосный фильтр 6 и электрод ЭВ. В случае отсутствия вращения прибора вокруг оси чувствительности стоячая волна имеет неподвижные узлы, расположенные под парами электродов Д2 и КЭВ. Электроды Д2 используются для измерения амплитуды колебаний резонатора в точках, с которыми они связаны, а электроды КЭВ – для компенсации этих колебаний.
При наличии вращения прибора вокруг оси чувствительности с некоторой угловой скоростью Ω, как это показано, например, в [29], угол θ поворота стоячей волны относительно резонатора определяется следующим выражением:
 (2.136)
(2.136)
где К – коэффициент пропорциональности, равный примерно 0,3; ω0 – частота стоячей волны; ξ – коэффициент затухания колебаний. Указанная зависимость обусловлена тем, что ЭВ препятствуют повороту оси эллипса вибрации резонатора и это противодействие становится тем сильнее, чем сильнее отклоняется указанная ось от оси ЭВ. В свою очередь, кориолисовы силы инерции, заставляющие прецессировать волну вокруг оси симметрии вибратора, пропорциональны угловой скорости Ω поворота основания прибора вокруг этой оси. Угол θ будет определяться равенством отклоняющего и препятствующего воздействий и, следовательно, будет пропорционален скорости Ω.
При наличии угла θ узлы стоячей волны также переместятся в новое положение и в местах расположения электродов Д2 и КЭВ будут наблюдаться колебания, амплитуда которых определяется углом θ. С целью измерения значения угла θ достаточно вычислить отношение амплитуд w1 и w2 колебаний резонатора в местах расположения электродов Д1 и Д2 и подставить результат в следующее равенство [29]:
 (2.137)
(2.137)
К другим способам измерения угла θ можно отнести компенсационный, который использован в схеме, представленной на рис. 2.34. В данном способе с помощью датчика Д2 измеряется амплитуда колебаний резонатора, и его сигнал после предварительного усиления в усилителе 4 и преобразования в широкополосном фильтре 6 поступает на компенсационный электрод возбуждения КЭВ, который устраняет колебания, порождаемые угловой скоростью вращения основания гироскопа. Компенсационное напряжение, снимаемое на выходе демодулятора 7, пропорционально входной угловой скорости. Максимальная точность, достигнутая при испытании ВТГ-ДУС рассматриваемого класса, составила 0,01 град/с [29].
 С целью построения ВТГ-ИГ используется параметрическое возбуждение колебаний резонатора с помощью кольцевого электрода, окружающего его кромку (рис. 2.36). Поверхности резонатора 2 и кольцевого электрода 1 можно рассматривать, как обкладки цилиндрического конденсатора, к которым приложено напряжение, с частотой, близкой к собственной частоте резонатора (примерно 2500 Гц). Возбуждение колебаний происходит за счет того, что при любой вариации зазора между обкладками конденсатора силы притяжения, действующие на них при наличии напряжения ~U, будут большими там, где зазор меньше, и меньшими там, где этот зазор больше. При вращении основания вокруг оси симметрии резонатора, как и в предыдущем случае, будет иметь место инерционное смещение стоячей волны вокруг этой оси. В силу того, что при использовании кольцевого электрода силы, препятствующие этому смещению со стороны системы возбуждения стоячей волны, отсутствуют, скорость поворота осей стоячей волны будет пропорциональна угловой скорости поворота основания прибора:
С целью построения ВТГ-ИГ используется параметрическое возбуждение колебаний резонатора с помощью кольцевого электрода, окружающего его кромку (рис. 2.36). Поверхности резонатора 2 и кольцевого электрода 1 можно рассматривать, как обкладки цилиндрического конденсатора, к которым приложено напряжение, с частотой, близкой к собственной частоте резонатора (примерно 2500 Гц). Возбуждение колебаний происходит за счет того, что при любой вариации зазора между обкладками конденсатора силы притяжения, действующие на них при наличии напряжения ~U, будут большими там, где зазор меньше, и меньшими там, где этот зазор больше. При вращении основания вокруг оси симметрии резонатора, как и в предыдущем случае, будет иметь место инерционное смещение стоячей волны вокруг этой оси. В силу того, что при использовании кольцевого электрода силы, препятствующие этому смещению со стороны системы возбуждения стоячей волны, отсутствуют, скорость поворота осей стоячей волны будет пропорциональна угловой скорости поворота основания прибора:
 (2.138)
(2.138)
а ее угол поворота относительно резонатора
 (2.139)
(2.139)
где К – коэффициент пропорциональности, слабо зависящий от параметров резонатора, φ – угол поворота основания.
Как видим, в рассматриваемом случае угол поворота стоячей волны оказывается пропорциональным интегралу от угловой скорости поворота основания прибора, что и позволило считать гироскоп интегрирующим.

Для съема информации с прибора [27] используются восемь датчиков линейных перемещений (рис. 2.36), аналогичных тем, которые использовались в ВТГ-ДУС. Каждый электрод электрически связан с диаметрально противоположным электродом.
Закон изменения амплитуды w(φ,t) вибрации резонатора может быть представлен в следующем виде [29]:
 (2.140)
(2.140)
где а и т – амплитуды колебаний резонатора вдоль осей электродов 1 – 5 и 3 – 7, соответственно; b и п – амплитуды колебаний вдоль осей электродов 2 – 6 и 4 – 8; ω – частота возбуждаемых колебаний. Параметры а, b, т и п определяются путем фазового детектирования сигналов датчиков с использованием опорного напряжения, изменяющегося с частотой ω. Для этого указанные сигналы усиливаются предварительными 9 –12 и операционными 13, 14 усилителями и поступают на входы фазных 15 – 17 и квадратурных 16 – 18 демодуляторов. Выходные сигналы демодуляторов, пропорциональные искомым амплитудам колебаний, преобразуются в цифровую форму в аналого – цифровом преобразователе 19 и поступают в вычислитель 20, который и рассчитывает текущее значение угла поворота основания прибора. Для этого используется несложное равенство, связывающее искомую величину с измеренными параметрами [29]:
 (141)
(141)
 Как уже отмечалось выше, конструкция ВТГ отличается относительной простотой и технологичностью. В качестве примера на рис. 2.38 представлена конструктивная схема ВТГ – ДУС, построенная на базе полусферического резонатора 4, жестко связанного с внутренним корпусом 6. На этом же корпусе располагаются электроды возбуждения 5. Измерительные электроды (датчики перемещений) 3 размещаются на наружном корпусе 2. Для снабжения системы электропитанием используются герметические вводы 1. Для уменьшения демпфирования
Как уже отмечалось выше, конструкция ВТГ отличается относительной простотой и технологичностью. В качестве примера на рис. 2.38 представлена конструктивная схема ВТГ – ДУС, построенная на базе полусферического резонатора 4, жестко связанного с внутренним корпусом 6. На этом же корпусе располагаются электроды возбуждения 5. Измерительные электроды (датчики перемещений) 3 размещаются на наружном корпусе 2. Для снабжения системы электропитанием используются герметические вводы 1. Для уменьшения демпфирования
 колебаний резонатора на внутреннем и наружном корпусах прибора между электродами выбраны специальные пазы.
колебаний резонатора на внутреннем и наружном корпусах прибора между электродами выбраны специальные пазы.
Конструктивная схема ВТГ – ИГ аналогична рассмотренной схеме. В качестве примера на рис. 2.39 показана конструкция гироскопа фирмы GMC [29]. Здесь также используется резонатор 8 полусферической формы, установленный на внутреннем корпусе 6 прибора. Электроды 3 датчиков выходного сигнала с их монтажными каналами 2 располагаются на наружном корпусе 1. Кольцевой электрод возбуждения 4 и дополнительные электроды 5 совместно с монтажными каналами 7 размещаются на внутреннем корпусе прибора. Электроды выполнены напылением на сферическую поверхность металлической пленки соответствующей конфигурации. Все электрические соединения выполняются на монтажной плате 9. Как правило, внутри корпуса прибора поддерживается высокий вакуум примерно от 0,1 · 10-6 до 10-6 Па, что позволяет обеспечить высокую добротность колебательной системы.
Дата добавления: 2017-02-13; просмотров: 5159;
Поиск по сайту
Узнать еще
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- I.1.3 ТЕРМОДИНАМИЧЕСКИЙ ПРОЦЕСС. ИЗОПРОЦЕССЫ
- Адаптация и динамические реакции
- Азотный термодинамический цикл работы двигателей внутреннего сгорания
- Анализ динамических процессов систем управления
- АНАЛИЗ РЕЗУЛЬТАТОВ ГИДРОДИНАМИЧЕСКИХ ИССЛЕДОВАНИЙ ГОРИЗОНТАЛЬНЫХ СКВАЖИН
- Анализ уравнений двухгироскопного компаса
- Аналого-цифровые преобразователи: назначение, ошибки преобразования, способы уменьшения динамических ошибок преобразования. Виды АЦП, сравнительная оценка.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
