Методы составления уравнений гироскопических приборов
Уравнения гироскопического прибора или системы являются приближенной математической моделью реального изделия, позволяющей без использования натурного макетирования исследовать его основные свойства и получить количественные характеристики интересующих нас параметров. На практике обычно не удается составить уравнения, в полной мере соответствующие свойствам изделия, и тем более провести их анализ в общем виде. Поэтому изначально составляют уравнения с учетом тех или иных упрощающих допущений, а затем уже приводят их к виду, доступному для анализа каким-либо выбранным способом.
При составлении уравнений нужно четко определить:
§ задачу, которую предстоит решить;
§ кинематическую схему рассматриваемого прибора, с учетом основных факторов, влияющих на результат анализа;
§ круг возможных допущений, позволяющих упростить решение поставленной задачи;
§ используемый способ составления уравнений;
§  способ решения полученных уравнений и анализа результатов исследования.
способ решения полученных уравнений и анализа результатов исследования.
Существуют различные способы составления уравнений, описывающих работу гироскопических приборов. Рассмотрим два из них, наиболее подходящих для изучения судоводителями. Вначале, используя уже известную теорему о кинетическом моменте, получим уравнения гироскопа в форме Эйлера. Для этого введем в рассмотрение некоторую базовую систему координат ox0 y0 z0 (рис. 2.13), в которой будем наблюдать движение ротора гироскопа. Оси этой системы координат выбирают обычно таким образом, чтобы они имели идеальную ориентацию, наилучшим образом подходящую для решения поставленной задачи. В этом случае отклонения осей ротора гироскопа от осей выбранной системы координат будут представлять собой ошибки его угловой ориентации, закон изменения которых при воздействии различных внешних факторов и является в подавляющем большинстве случаев объектом исследования. Кроме того, в силу малости значений ошибок, как правило, удается упростить полученные уравнения и процесс их решения.
Базовая система координат может быть неподвижной в инерциальном пространстве или вращаться в ней с некоторой угловой скоростью  , составляющие которой по осям ox0, оy0 и оz0 обозначим через ωхо, ωуо и ωzo.
, составляющие которой по осям ox0, оy0 и оz0 обозначим через ωхо, ωуо и ωzo.
Будем считать, что в начальный момент времени оси oxpypzp, жестко связанные с ротором, совпадали с осями oxoy0z0, а в дальнейшем под действием тех или иных моментов внешних сил ротор повернулся вокруг оси oz0 с угловой скоростью  на некоторый угол
на некоторый угол  . При этом система координат, связанная с ним, заняла положение ox1yz0. Под действием указанных моментов ротор также может повернуться вокруг оси оу с угловой скоростью
. При этом система координат, связанная с ним, заняла положение ox1yz0. Под действием указанных моментов ротор также может повернуться вокруг оси оу с угловой скоростью  на некоторый угол
на некоторый угол  , и его новое положение будет определяться осями oxyz. Наконец, в силу наличия угловой скорости
, и его новое положение будет определяться осями oxyz. Наконец, в силу наличия угловой скорости  вращения ротора, последний повернется вокруг оси ох на некоторый угол
вращения ротора, последний повернется вокруг оси ох на некоторый угол  , и система координат, жестко связанная с ним, займет положение oxpypzp. В дальнейшем не будем интересоваться движением ротора вокруг оси ох, полагая практически постоянной его скорость , а сосредоточим свое внимание на изучении законов изменения углов и , описывающих движение главной оси ротора или, что то же самое, системы координат oxyz. Эти оси получили название осей Резаля.
, и система координат, жестко связанная с ним, займет положение oxpypzp. В дальнейшем не будем интересоваться движением ротора вокруг оси ох, полагая практически постоянной его скорость , а сосредоточим свое внимание на изучении законов изменения углов и , описывающих движение главной оси ротора или, что то же самое, системы координат oxyz. Эти оси получили название осей Резаля.
Обратимся теперь к теореме о кинетическом моменте. В общем случае изменение вектора  кинетического момента гироскопа происходит за счет изменения его модуля, которое определяется локальной производной
кинетического момента гироскопа происходит за счет изменения его модуля, которое определяется локальной производной
 , вычисленной относительно осей Резаля, и изменения направления в инерциальном пространстве с некоторой угловой скоростью . Таким образом
, вычисленной относительно осей Резаля, и изменения направления в инерциальном пространстве с некоторой угловой скоростью . Таким образом
 . (2.12)
. (2.12)
Представляя вектор его составляющими р, q и r по осям ох, оу и oz, соответственно, а вектор - составляющими Нx, Нy и Нz
 (2.13)
(2.13)
где  и
и  - орты осей Резаля, и подставляя (2.13) в (2.12) найдем:
- орты осей Резаля, и подставляя (2.13) в (2.12) найдем:
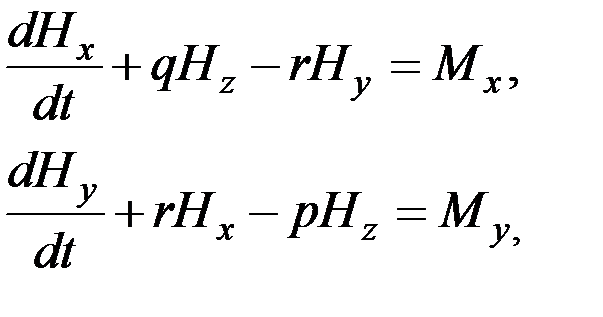 (2.14)
(2.14)

где Мх, Mу и Mz — составляющие вектора момента  по соответствующим осям.
по соответствующим осям.
В силу того, что ротор вращается с высокой угловой скоростью , можно не учитывать остальные составляющие скоростей вдоль главной оси и считать  . Здесь
. Здесь  - осевой момент инерции ротора (см. приложение П1). В свою очередь,
- осевой момент инерции ротора (см. приложение П1). В свою очередь,  а
а  , где
, где  - экваториальный момент инерции ротора.
- экваториальный момент инерции ротора.
С учетом сказанного выражения (2.14) можно переписать в виде:
 (2.15)
(2.15)
Полученные уравнения иногда называют обобщенными уравнениями Эй-лера, так как их можно рассматривать как наиболее общие уравнения вращательного движения симметричного тела около неподвижной точки.
Выражения для угловых скоростей p, qиr,входящих в полученные уравнения, не трудно записать, вернувшись к рис. 2.13:
 (2.16)
(2.16)
Учитывая, что ошибки и ориентации ротора малы, можно принять  При этих допущениях выражения (2.16) примут вид:
При этих допущениях выражения (2.16) примут вид:
 (2.17)
(2.17)
Достаточно популярным способом составления уравнений, в основном, для качественного анализа работы относительно простых гироскопических устройств является способ Б. И. Кудревича. В его основу положен принцип Даламбера, который применительно к вращательному движению может быть сформулирован следующим образом: сумма моментов всех сил, приложенных к вращающемуся телу, равна нулю. Таким образом, задача составления уравнений гироскопа сводится к тому, чтобы определить все существенные моменты, действующие на его ротор, и их сумму приравнять нулю.
 Рассмотрим последовательность решения указанной задачи на примере составления уравнения трехстепенного гироскопа. Как и в предыдущем случае, прежде всего, выбираем базовую систему координат ох0у0z0 (рис. 2.14), которая, имеет идеальную для решаемой задачи (данного типа прибора) ориентацию осей. Будем считать, что эта система вращается в инерциальном пространстве с некоторыми угловыми скоростями
Рассмотрим последовательность решения указанной задачи на примере составления уравнения трехстепенного гироскопа. Как и в предыдущем случае, прежде всего, выбираем базовую систему координат ох0у0z0 (рис. 2.14), которая, имеет идеальную для решаемой задачи (данного типа прибора) ориентацию осей. Будем считать, что эта система вращается в инерциальном пространстве с некоторыми угловыми скоростями  и
и  . Как и прежде, примем, что в начальный момент времени оси Резаля совпадали с осями базовой системы координат. Затем под действием внешних моментов ротор гироскопа стал последовательно поворачиваться с ускорением
. Как и прежде, примем, что в начальный момент времени оси Резаля совпадали с осями базовой системы координат. Затем под действием внешних моментов ротор гироскопа стал последовательно поворачиваться с ускорением  и угловой скоростью вокруг оси oz0, а также с ускорением
и угловой скоростью вокруг оси oz0, а также с ускорением  и угловой скоростью вокруг оси оу. В результате в некоторый фиксированный момент времени оси охуz, связанные с ротором, окажутся повернутыми относительно базовых осей на углы а и β. В процессе указанных поворотов на гироскоп действуют (рис. 2.14):
и угловой скоростью вокруг оси оу. В результате в некоторый фиксированный момент времени оси охуz, связанные с ротором, окажутся повернутыми относительно базовых осей на углы а и β. В процессе указанных поворотов на гироскоп действуют (рис. 2.14):
§ моменты сил инерции  и
и  , направленные противоположно ускорениям и ;
, направленные противоположно ускорениям и ;
§ моменты гироскопической реакции  и
и  , где
, где  и
и  абсолютные угловые скорости вращения осей Резаля ;
абсолютные угловые скорости вращения осей Резаля ;
§ моменты Му и Мz внешних сил.
Имеется целый ряд менее значимых по величине моментов, которые опущены из рассмотрения, в силу того, что они не искажают качественной картины поведения гироскопа и не существенно влияют на количественные оценки, если речь не идет об очень точных (прецизионных) приборах. Суммируя указанные моменты отдельно по осям оу и оz и приравнивая полученные суммы нулю, найдем:
 (2.18)
(2.18)
Учитывая малость угла перепишем уравнения (2.18) в следующем виде:
 (2.19)
(2.19)
Подставляя в равенства (2.19) выражения (2.17) для абсолютных угловых скоростей q и r, запишем уравнения движения рассматриваемого гироскопа в окончательном виде:
 (2.20)
(2.20)
Полученная система уравнений, как и система в форме Эйлера, показывает, что движение ротора гироскопа вокруг его осей взаимосвязано.
Поэтому любое воздействие на гироскоп вызывает соответствующую его реакцию по обеим рассматриваемым осям.
Из уравнений (2.20) легко получить уравнения, которые описывают движение гироскопа относительно инерциальной (неподвижной в пространстве) системы координат.
 (2.21)
(2.21)
Дополнительно следует отметить, что для анализа сложных гироскопических систем очень часто исходные уравнения составляют, используя второй метод Лагранжа [32], позволяющий формальным путем получить наиболее точные уравнения. Однако, в силу его относительной громоздкости, в данной книге этот способ не рассматривается.
Дата добавления: 2017-02-13; просмотров: 2754;
Поиск по сайту
Узнать еще
- I. История открытия и методы исследования вирусов
- II. Категории и методы политологии.
- III. Методы искусственной физико-химической детоксикации.
- Абсолютный возраст горных пород и методы его определения
- Автоматизация составления технического задания и технической концепции на проектирование (подбор) муфты
- Автоматические методы изготовления фотошаблонов.
- Автомодельного ламинарного течения жидкости в трубе с использованием системы дифференциальных уравнений, описывающих течение жидкости в трубе
- Агротехнические методы (приемы) обработки почвы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
