Особенности работы каналов автопилота
Автопилот обеспечивает следующие режимы работы:
- включение питания и режим согласования;
- режим стабилизации;
- режим управления;
- отключение автопилота.
Режим согласования – режим автоматической подготовки автопилота к включению силовой части. Чтобы при включении автопилота не было рывков органов управления необходимо, чтобы на выходе агрегата управления АУ сигнал отсутствовал. Для этого все входные сигналы должны быть равны нулю.
Режим стабилизации – по сигналам чувствительных элементов (АГБ-3К, ГА-6 ГМК, КВ-11) автопилот вырабатывает сигналы отклонения от заданных значений параметров  , и сервоприводы каналов отклоняют органы управления вертолета таким образом, чтобы вернуть его к исходному положению в пространстве.
, и сервоприводы каналов отклоняют органы управления вертолета таким образом, чтобы вернуть его к исходному положению в пространстве.
Режим управления – используется для небольших изменений параметров полета по тангажу, крену и курсу путем подачи электрических сигналов на вход автопилота.
Также режим управления позволяет выполнять маневры в вертикальной и горизонтальной плоскости от РЦШ и педалей.
Канал направления.
Режим согласования.
На вход канала курса агрегат управления поступают следующие сигналы:
- от ДОС РА-60Б сигнал переменного тока пропорциональный перемещению ОУ  от АП. Перед включением канала ДОС находится в нейтральном положении и выдает нулевой сигнал (выполнена конструктивно);
от АП. Перед включением канала ДОС находится в нейтральном положении и выдает нулевой сигнал (выполнена конструктивно);
- от ДУС курса сигнал переменного тока, пропорциональный ωу ;
- сигнал курса от СД ГА курсовой системы.
Так как АП может быть включен на любом курсе, сигнал необходимо обнулить. Обнуление сигнала обеспечивается механизмом согласования пульта управления следующим образом: сигнал сельсина датчика ГА поступает на СП ПУ. С ротора СП сигнал переменного тока поступает на вход полупроводникового усилителя БУ.
Усиленный сигнал поступает на обмотку управления ДГ-0,5, который через редуктор поворачивает ротор СП в положение, при котором сигнал с ротора СП становится равным нулю. Из-за неточности обнуления угла, наличия остаточных сигналов с ДОС и ДУС на входе может оказаться какой-то сигнал. Для более точного обнуления этого сигнала в АУ установлен потенциометр центровки R43 «центр».
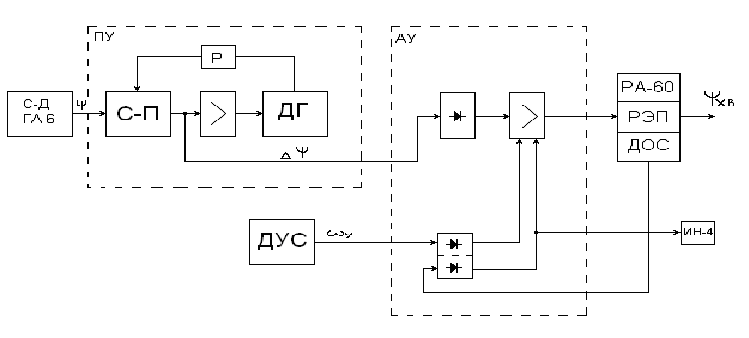
Рис.20 Принципиальная схема канала направления автопилота.
Режим стабилизации
Включение канала курса в режим стабилизации обеспечивается кнопкой-лампой на ПУ, при этом:
- загорается зеленая лампа в кнопке-лампе включения канала;
- прекращает работу механизм согласования (разрывается цепь питания обмотки возбуждения ДГ и с помощью электромагнита положение ротора сельсина- приемника в режиме стабилизации остается неизменным);
- подается питание на ГА-192/2, который переключает гидроусилитель из режима ручного в режим комбинированного управления.
Суть режима: АП стабилизирует курс, который был в момент включения канала направления. В случае отклонения от курса на вход АУ поступают сигналы  и
и  . АУ выпрямляет, усиливает и суммирует сигналы. Суммарный сигнал поступает на дифференциально-включенные обмотки поляризованного реле РЭП-8Т гидроусилителя РА-60Б. Это вызывает перемещение штока малого цилиндра и, следовательно, выходного штока со скоростью пропорциональной суммарному управляющему сигналу. РА-60Б изменяет угол установки лопастей хвостового винта.
. АУ выпрямляет, усиливает и суммирует сигналы. Суммарный сигнал поступает на дифференциально-включенные обмотки поляризованного реле РЭП-8Т гидроусилителя РА-60Б. Это вызывает перемещение штока малого цилиндра и, следовательно, выходного штока со скоростью пропорциональной суммарному управляющему сигналу. РА-60Б изменяет угол установки лопастей хвостового винта.
По мере перемещения штока малого цилиндра ДОС начинает выдавать сигналы переменного тока пропорциональные ходу штока. Сигнал поступает в АУ. Полярность сигнала ДОС обратна полярности управляющего сигнала. По мере движения штока малого цилиндра сигнал датчика обратной связи возрастает.
При достижении равенства сигнала датчиков обратной связи и управляющего сигнала входной сигнал компенсируется, движение штока рулевого агрегата прекращается. Органы управления вертолета оказались отклоненными на величину пропорциональную управляющему сигналу, а вертолет выведен на курс включения АП.
Для расширения зоны действия в РА-60Б имеется механизм перегонки. Если головка гидроусилителя займет крайнее положение, срабатывает концевой выключатель КВ механизма перегонки. Через этот КВ +27 подается на электромагнитный тормоз ножного управления. ЭМТ срабатывает, освобождает педали, а пружина через тягу передвигает педали. За счет этого головка цилиндра смещается в сторону нейтрали, обеспечивая запас управления для АП.
После выпрямления сигнал обратной связи поступает на визуальный прибор магнитоэлектрической системы ИН-4, стрелка которого, отклоняясь, указывает положение штока малого цилиндра РА-60Б, и, следовательно, отклонение органов управления вертолета от первоначального положения, соответствующего момента включения автопилота.
Режим управления
При включенном АП летчик может в любой момент вмешаться в управление
- при помощи ручек центровки на ПУ для введения небольших поправок (±5º);
- при помощи обычных рычагов управления.
1. Допустим, летчику надо ввести поправку по курсу на 1º. Для этого необходимо нажать и повернуть ручку центровки на пульте управления в нужную сторону. При этом будет поворачивать шкала, видная в окошке над ручкой.
На шкале нанесены оцифрованные деления, каждое из которых соответствует 1º поворота вертолета. При повороте шкалы на одно деление ротор СП, который через редуктор связан со шкалой, поворачивается на 1º. Появляется сигнал рассогласования в 1º, который с ротора СП поступает в агрегат управления и далее на рулевой агрегат.
Органы управления перемещаются и вызывают отклонение вертолета. Сигнал отклонения вертолета с СД ГА-6 начинает компенсировать сигнал от поворота ротора СП. Полная компенсация наступит тогда, когда вертолет окажется отклоненным на 1º, при этом органы управления возвратятся в первоначальное положение.
2. Изменение курса в больших пределах производится педалями. При нажатии любого из подпедальников срабатывают концевые выключатели КВ, установленные в системе управления. Рулевой агрегат переключается на ручной режим работы, подается питание на обмотку возбуждения ДГ-0,5, начинает работать механизм согласования. При этом сигнал изменения курса будет обнуляться, как в режиме согласования.
После занятия нового курса  механизм согласования прекращает свою работу, АП начинает стабилизировать новый курс.
механизм согласования прекращает свою работу, АП начинает стабилизировать новый курс.
Отключения канала курса производится 2 способами:
1. кнопкой-лампой на ПУ (раздельное управление);
2. кнопкой выключения АП на РЦШ (общее выключение всех 4 каналов).
Канал крена
Режим согласования
Аналогичен работе канала направления в режиме согласования..
Отличие: Сигнал крена СД АГБ-3 поступает не непосредственно на СП ПУ, а сначала на дифференциальный сельсин компенсационного датчика (КДК), с него на СП ПУ.
Таким образом, на СП ПУ поступает сигнал, пропорциональный разности между сигналом крена АГБ и креном, заданным пилотом от РЦШ. Этот сигнал перед включением канала крена согласуется механизмом согласования канала крена, вращается шкала, то есть сигнал от КДК согласуется постоянно, рис.
Режим стабилизации
Аналогичен работе канала направления в режиме стабилизации.
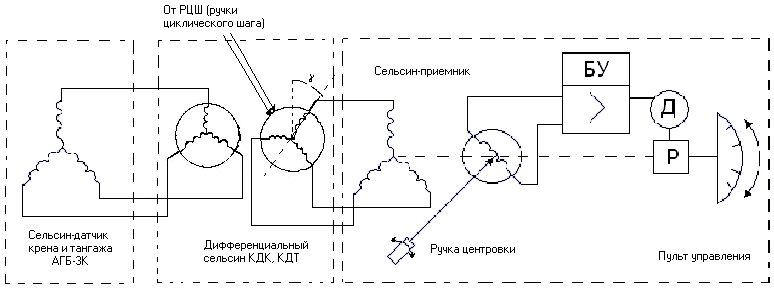
Рис.21 Схема включения компенсационных датчиков КДК, КДТ в каналы крена и тангажа
Режим управления
В канале крена предусмотрено управление вертолетом от РЦШ без выключения соответствующего канала АП.
При отклонении РЦШ по крену через тягу пилот перемещает золотник КАУ-30Б, вертолет входит в крен. Чтобы АГБ не вызвал сигнал, парирующий действие РЦШ, вводится новое значение крена γзад. путем разворота поводка КДК на угол, пропорциональный отклонению ручки циклического шага. То есть ротор КДК поворачивается таким образом, что в сельсинной передаче происходит компенсация углов, появляющихся в результате отклонения вертолета (от АГБ) сигналами КДК.
Канал тангажа
Работа канала тангажа аналогична работе канала крена.
Особенности: На вход АУ помимо сигнала ∆υ,  подается сигнал скорости от КЗСП при условии включения канала высоты.
подается сигнал скорости от КЗСП при условии включения канала высоты.
Отключение каналов крена и тангажа:
Кнопкой АП на ручке циклического шага
Канал высоты
Режим согласования.
В этом режиме на вход АУ сигналы не поступают, т.к. при выключенном автопилоте корректор высоты КВ-11 сигнала не выдает (согласование происходит в самом КВ-11). Поэтому в канале высоты механизм согласования отсутствует.
Включение канала высоты:
При нажатии кнопки-лампочки КНЛ « ВЫСОТА»:
- загорается КНЛ;
- подается +27в на электромагнитную муфту КВ-11;
- подается питание на КЗСП;
- подается питание на электрогидравлический кран ГА-192, который подключает КАУ-30Б к управлению от автопилота.
Режим стабилизации
В случае отклонения вертолета от заданной высоты механизм измерителя КВ-11 передвигает щетку потенциометра. Напряжение, снимаемое со щетки, пропорционально ∆Н, а полярность – поправлению направлению изменения высоты. Далее сигнал усиливается в агрегате управления и подается на поляризованное реле РЭП-8Т гидроусилителя КАУ-30Б. Изменяется угол установки лопастей несущего винта НВ, и вертолет возвращается на заданную высоту.
В канале высоты на пульте управления имеется нажимной тумблер «контроль». С помощью этого тумблера имитируется сигнал от КВ-11 ∆Н, т.е. шток малого цилиндра гидроусилителя можно устанавливать в ту или иную сторону, тем самым выбирая 20% хода управления от автопилота. Используется при наземной проверке АП-34Б.
Режим управления.
Если летчик хочет вмешаться в управление при включенном канале высоты, он должен нажать кнопку «ФРИКЦИОН» на ручке «шаг-газ». При этом канал высоты отключается.
После вывода вертолета на нужную высоту для ее стабилизации необходимо вновь нажать кнопку включения канала.
Отключение канала высоты:
- кнопкой-лампой КНЛ «ВЫСОТА» на пульте управления;
-кнопкой «ФРИКЦИОН» на ручке «шаг-газ»
-кнопкой АП на ручке циклического шага РЦШ.
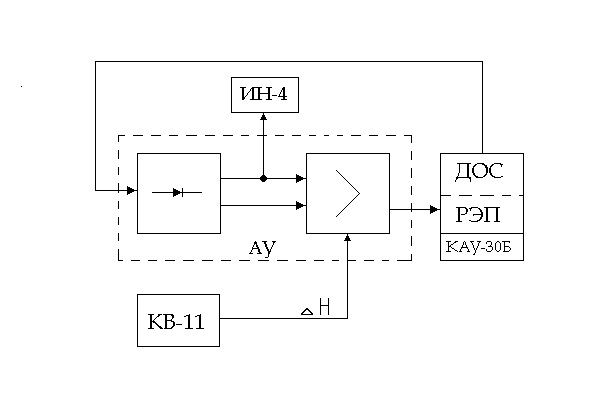
Рис.22 Принципиальная схема канала высоты
Дата добавления: 2017-02-13; просмотров: 5086;
Поиск по сайту
Узнать еще
- C учетом изменения статической работы балки
- I. ОСОБЕННОСТИ ДЕЛОВОГО И ЛИЧНОСТНОГО ОБЩЕНИЯ В СОВМЕСТНОЙ ДЕЯТЕЛЬНОСТИ
- I. Режимы работы электротехнических устройств.
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- I2. Особенности аэродинамики несущего винта (НВ)
- IA класс — блокаторы натриевых каналов, удлиняющие ЭРП
- IB класс — блокаторы натриевых каналов, укорачивающие ЭРП
- II. Завоевание Китая маньчжурами. Экономическое положение страны в XVII – начале XIX вв.: аграрная политика Цинской династии, особенности развития городского ремесла

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
