Компенсационные датчики крена и тангажа КДК и КДТ
Предназначены для компенсации сигналов углов крена и тангажа поступающих в автопилот с авиагоризонта.
КД представляет собой дифференциальный сельсин, на оси ротора которого заштифтован держатель. К держателю крепится лимб с делениями и рычаг.
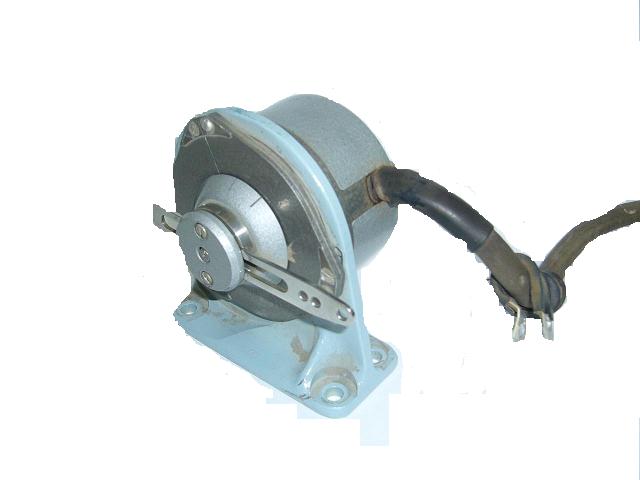
Рис.15 Внешний вид компенсационного датчика
Рычаг предназначен для соединения ротора сельсина с ручкой циклического шага через тяги поперечного продольного управления. Плечо рычага меняется. Дифференциальный сельсин имеет 3-хфазную обмотку на статоре и роторе. Они соединяются с обмотками синхронизации СД АГБ и СП ПУ. При повороте ротора СД на угол  ось магнитного потока Ф статора дифференциального сельсина повернется на тот же угол
ось магнитного потока Ф статора дифференциального сельсина повернется на тот же угол  . Если ротор ДС повернуть относительно статора на угол
. Если ротор ДС повернуть относительно статора на угол  , то угол поворота ротора относительно потока Ф составит
, то угол поворота ротора относительно потока Ф составит  . ЭДС, наводимая в роторной обмотке дифференциала КД пропорциональна сумме углов
. ЭДС, наводимая в роторной обмотке дифференциала КД пропорциональна сумме углов  .
.
В результате возникнут токи ротора дифференциального сельсина с обмотками статора СП ПУ.
Магнитный поток этих токов создаст вращающий момент, который повернет ротор СП на .
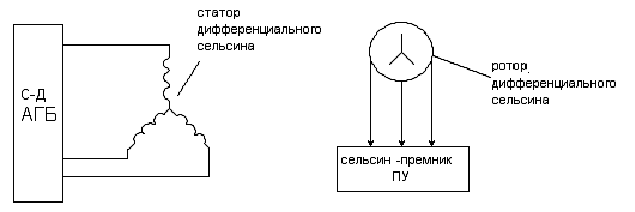
Рис.16 Принципиальная схема компенсационных датчиков крена и тангажа КДК и КДТ
Дата добавления: 2017-02-13; просмотров: 3584;
Поиск по сайту
Узнать еще
- IV. Термодатчики, их устройство и назначение.
- АКУСТИЧЕСКИЕ ДАТЧИКИ ТЕМПЕРАТУРЫ
- Аэродинамические управляющие моменты тангажа
- Бесконтактные датчики положения
- Влияние обводов корпуса, крена и дифферента на маневренные качества судна.
- Датчики абсолютного давления.
- Датчики активного сопротивления
- Датчики давления воды

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
