Корректор-задатчик приборной скорости КЗСП

Рис.11 Внешний вид КЗСП
Корректор-задатчик приборной скорости КЗСП предназначен для вычисления параметров Vприб., необходимых для управления и стабилизации скорости полета автопилотом .
Выходными параметрами КЗСП являются:
1) текущее значение Vприб. , выдаваемое в виде относительного электрического сопротивления потенциометра.
2) отклонение Vприб. от заданного значения в виде напряжения постоянного тока.
Технические данные
питание: постоянный ток - 27 в.
переменный ток ~36 в. 400 Гц
диапазон работы
корректора по V 150÷1300 км/ч
Принцип действия
КЗСП обеспечивает 2 режима работы: - режим обнуления;
- режим коррекции.
В режиме обнуления корректор работает тогда, когда не требуется поддерживать Vполета постоянной с помощью автопилота. В этом режиме КЗСП выдает текущее значение Vприб.
В режиме коррекции работает, когда требуется поддерживать скорость полета на заданном значении с помощью автопилота. В этом режиме КЗСП выдает в АП отклонение Vполета от заданного значения.
Для выбора режима работы с ПУ АП в КЗСП в качестве управляющей команды подается сигнал + 27в «вкл. коррекции»; при отсутствии этого сигнала КЗСП работает в режиме «обнуления».
Включение КЗСП обеспечивается нажатием кнопки-лампы высота «КНЛ Н
Основные элементы КЗСП:
- ЧЭ – манометрическая коробка
- индукционный датчик ИД;
- отрабатывающая система: двигатель-генератор ДГ, усилитель, редуктор Р.
Усилитель 2 работает в режиме «коррекции».
В комплекте с КЗСП работает БСГ (блок сигнала готовности).
. 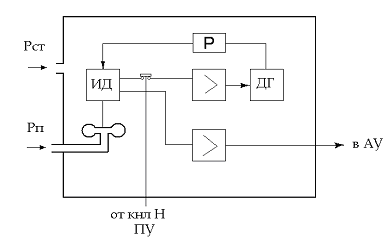
Рис.12 Принципиальная схема КЗСП.
.
БСГ предназначен для контроля исправности отрабатывающей системы в режиме «обнуления». В качестве входного сигнала в БСГ служит выходной сигнал ∆V КЗСП в виде U переменного тока с частотой 400 ГЦ. Выходным сигналом БСГ является +27 В – сигнал готовности.
Сигнал готовности свидетельствует об исправности отрабатывающей системы корректора. При выходе из строя отрабатывающей системы КЗСП сигнал готовности снимается и выдается сигнал «отказ».
БСГ выдает сигнал готовности +27 в при:
1. при одновременном отсутствии выходного и управляющего сигнала;
2. при подаче входного сигнала любой величины от 0 в до 30 в и управляющего сигнала + 27в в режиме коррекции.
БСГ снимает сигнал готовности при:
1. подаче входного сигнала 9 в и отсутствии + 27в
2. отсутствии питания + 27в.
Корректор высоты КВ-11

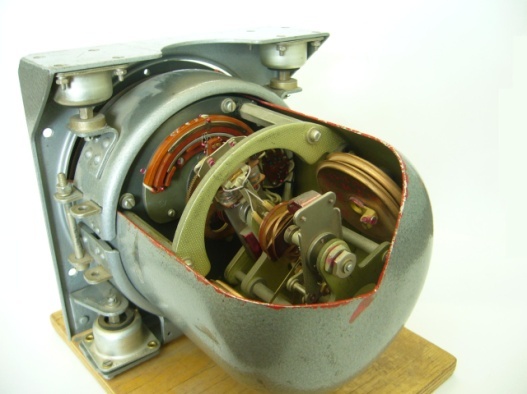
Рис.13 Внешний вид КВ-11.
Корректор высоты КВ-11 предназначен для выдачи в АП сигналов отклонения барометрической высоты от заданного значения.
Технические данные
Питание: переменного тока ~36 в 400 Гц
постоянного тока 27в
Полное сопротивление
потенциометра 750 Ом
Максимальное выходное
напряжение, снимаемое
с потенциометра ±13,5в
Диапазон работы от 0 до 2000м
Зона нечувствительности прибора не более: на высотах 1 км – 5,5 м высоты
на 12 км – 12 м высоты.
на 20 км – 36 м высоты
Принцип действия.
КВ-11 представляет собой барометрический высотомер, снабженный следящей системой. В КВ-11 датчиком, измеряющим барометрическое давление при изменении высоты полета, является блок анероидных коробок. Перемещение жесткого центра анероидных коробок через передаточный механизм вызывает соответствующий поворот рамки индукционного датчика ИД. Следящая система прибора работает от сигналов рассогласования ИД. Напряжение, пропорциональное углу поворота рамки ИД относительно сердечника (статора) подается на усилитель, а с выхода усилителя на управляющую обмотку двигателя, который через редуктор поворачивает сердечник (статор) с катушками возбуждения ИД до устранения рассогласования между ним и рамкой (ротором).
С механизмом следящей системы при помощи электромагнитной муфты может соединяться щетка потенциометра КВ. При отключенной муфте центрирующая пружина автоматически устанавливает и удерживает щетку потенциометра в нулевом положении (против средней точки). После включения муфты с потенциометра КВ-11 снимается сигнал, величина и полярность которого соответствует отклонению высоты от значения, имевшего м есто в момент включения муфты.
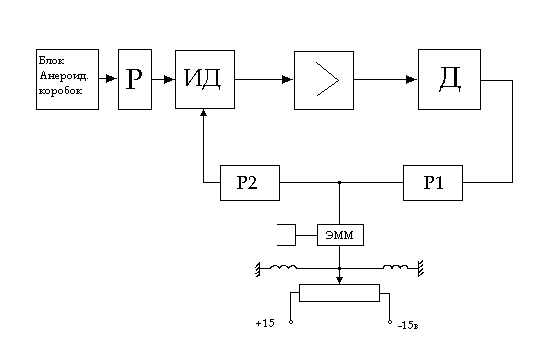
Рис.14 Функциональная схема КВ-11.
Конструкция
В герметичном корпусе на каркасе размещены следующие элементы:
- 2 блока анероидных коробок;
- передаточный механизм;
- индукционный датчик ИД;
- полупроводниковый усилитель;
- ДИД-0,5 с редуктором;
- ЭММ (муфта);
- потенциометр со щеткой;
- центрирующая пружина.
В торцевой части корпуса закреплены ШР для связи с электронной схемой автопилота и штуцер для подачи в корпус КВ-11 статического давления. Корпус крепится на амортизационном основании с подставкой.
Дата добавления: 2017-02-13; просмотров: 6487;
Поиск по сайту
Узнать еще
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- Абсолютные скорости изменения критериев оценки УБП
- Активные турбины со ступенями скорости
- Аэродинамический метод измерения воздушной скорости
- Вектор скорости. Средняя и мгновенная скорость.
- Векторные формулы скорости и ускорения точек тела, вращающегося вокруг неподвижной оси.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
