Типы преобразователей и их конструктивные особенности
Индуктивные датчики
Индуктивный датчик - это преобразователь параметрического типа, принцип действия которого основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником, вследствие изменения магнитного сопротивления RМ магнитной цепи датчика , в которую входит сердечник.
Широкое применение индуктивные датчики находят в промышленности для измерения перемещений и покрывают диапазон от 1мкм до 20мм. Также можно использовать индуктивный датчик для измерения давлений, сил, уровней расхода газа и жидкости и т. д. В этом случае измеряемый параметр с помощью различных чувствительных элементов преобразуется в изменение перемещения и затем эта величина подводится к индуктивному измерительному преобразователю. В случае измерения давлений, чувствительные элементы могут выполняться в виде упругих мембран, сильфонов, и т. д. Используются они и в качестве датчиков приближения, которые служат для обнаружения различных металлических и неметаллических объектов бесконтактным способом по принципу “да” или “нет”.
Возможные области применения датчиков чрезвычайно разнообразны, можно выделить лишь отдельные сферы:
· промышленная техника измерения и регулирования,
· робототехника,
· автомобилестроение,
· бытовая техника,
· медицинская техника.
Достоинства:
- простота и прочность конструкции, отсутствие скользящих контактов;
- возможность подключения к источникам промышленной частоты;
- относительно большая выходная мощность (до десятков Ватт);
- значительная чувствительность.
Недостатки:
-точность работы зависит от стабильности питающего напряжения по частоте;
- возможна работа только на переменном токе.
Типы преобразователей и их конструктивные особенности
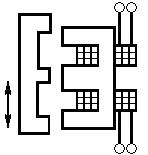
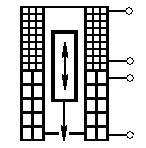
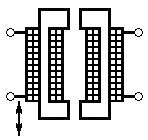
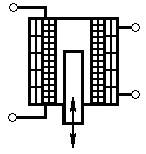
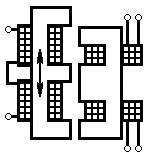
По схеме построения датчики можно разделить на одинарные и дифференциальные. Одинарный датчик содержит одну измерительную ветвь, дифференциальный – две.
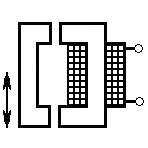
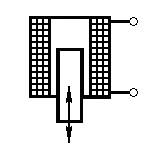
| Тип датчика | Переменный зазор | Переменная площадь зазора | Соленоидные | |
| Индуктивные | Одинарные | 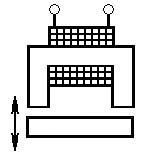
| 
| 
|
| Дифференциальные | 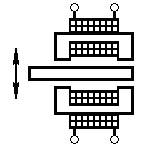
| 
| 
| |
| Взаимоиндуктивные | Одинарные | 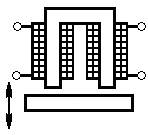
| 
| 
|
| Дифференциальные | 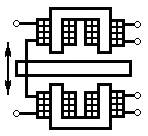
| 
| 
|
В дифференциальном датчике при изменении измеряемого параметра одновременно изменяются индуктивности двух одинаковых катушек, причем изменение происходит на одну и ту же величину, но с обратным знаком.
Как известно, индуктивность катушки:
 ,
,
где W– число витков; Ф – пронизывающий ее магнитный поток;  – проходящий по катушке ток. Ток связан с МДС
– проходящий по катушке ток. Ток связан с МДС  соотношением:
соотношением:
 .
.
Откуда получаем:
 ,
,
где  – магнитное сопротивление преобразователя.
– магнитное сопротивление преобразователя.
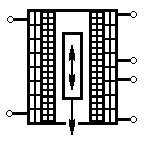
Рассмотрим, например, одинарный индуктивный датчик. В основу его работы положено свойство дросселя с воздушным зазором изменять свою индуктивность при изменении величены воздушного зазора.
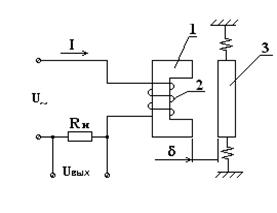
Состоит из ярма 1, обмотки 2, якоря 3- удерживается пружинами.
На обмотку 2 через сопротивление нагрузки Rн подается напряжение питания переменного тока.
Ток в цепи нагрузки определяется как :
где rд - активное сопротивление дросселя ;
L - индуктивность датчика.
Т.к. активное сопротивление цепи величина постоянная, то изменение тока I может происходить только за счет изменения индуктивной составляющей
XL=IRн ,
которая зависит от величены воздушного зазора d.
Т.о. , каждому значению d соответствует определенное значение I , создающего падение напряжения на сопротивлении Rн:
Uвых=IRн -
представляет собой выходной сигнал датчика.
Можно вывести аналитическую зависимость Uвых=f(d), при условии что зазор достаточно мал и потоками рассеяния можно пренебречь, и пренебречь магнитным сопротивлением железа Rмж по сравнению с магнитным сопротвлением воздушного зазора Rмв.
Приведем конечное выражение:

В реальных устройствах активное сопротивление цепи намного меньше индуктивного, тогда выражение сводится к виду:
Т.о. зависимость Uвых=f(d) имеет линейный характер (в первом приближении).
Реальная характеристика имеет вид:
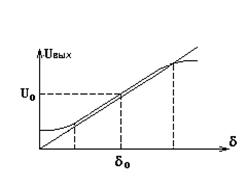
Отклонение от линейности в начале объясняется принятым допущением Rмж<< Rмв.
Дата добавления: 2017-01-16; просмотров: 2358;
Поиск по сайту
Узнать еще
- I. ОСОБЕННОСТИ ДЕЛОВОГО И ЛИЧНОСТНОГО ОБЩЕНИЯ В СОВМЕСТНОЙ ДЕЯТЕЛЬНОСТИ
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- I2. Особенности аэродинамики несущего винта (НВ)
- II. Завоевание Китая маньчжурами. Экономическое положение страны в XVII – начале XIX вв.: аграрная политика Цинской династии, особенности развития городского ремесла
- II. Особенности политического устройства Ирана
- II. Особенности развития турецкой буржуазии. Становление младотурецкого движения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
