При малых d магнитное сопротивление железа соизмеримо с магнитным сопротивлением воздуха.
Отклонение при больших d объясняются тем, что при больших d RL становится соизмеримой с величиной активного сопротивления -Rн+rд.
В целом рассмотренный датчик имеет ряд существенных недостатков :
- не меняется фаза тока при изменении направления перемещения;
- при необходимости измерять в обоих направлениях перемещение нужно устанавливать начальный воздушный зазор и, следовательно, ток I0,что неудобно;
- ток в нагрузке зависит от амплитуды и частоты питающего напряжения;
- в процессе работы датчика на якорь действует сила притяжения к магнитопроводу, которая ничем не уравновешивается, и значит вносит погрешность в работу датчика.
Дифференциальные (реверсивные) индуктивные датчики (ДИД)
ДИД представляет собой совокупность двух нереверсивных датчиков и выполняются в виде системы, состоящей из двух магнитопроводов с общим якорем и двумя катушками. Для ДИД необходимы два раздельных источника питания, для чего обычно используется разделительный трансформатор 5.
По форме магнитопровода могут быть ДИД с магнитопроводом Ш- образной формы, набранные из мостов электротехнической стали (при частотах выше 1000Гц применяются железо- никелевые сплавы- пермолой), и цилиндрические- со сплошным магнитопроводом круглого сечения. Выбор формы датчика зависит от конструктивного сочетания его с контролируемым устройством. Применение Ш- образного магнитопровода обусловлено удобством сборки катушки и уменьшением габаритов датчика.
Для питания ДИД используют трансформатор 5 с выводом средней точки на вторичной обмотке . Между ним и общим концом обеих катушек включается прибор 4. Воздушный зазор 0,2-0,5 мм.
При среднем положении якоря, когда воздушные зазоры с обеих ? одинаковы, индуктивные сопротивления катушек 3 и 3¢ одинаковы следовательно величины токов в катушках равныI1=I2 и результирующий ток в приборе равен 0.
При небольшом отклонении якоря в ту или иную сторону под действием контролируемой величены Х меняются величины зазоров и индуктивностей, прибор регистрирует разностный токI1-I2,он является функцией смещения якоря от среднего положения . Разность токов обычно регистрируется с помощью магнитоэлектрического прибора 4 (микроамперметра) с выпрямительной схемой В на входе.
Характеристика датчика имеет вид:
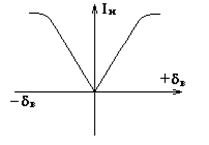
Полярность выходного тока остается неизменной независимо от знака изменения полного сопротивления катушек(для схемы Рис.1). При изменении направления отклонения якоря от среднего положения меняется на противоположную (на 180°) фаза тока на выходе датчика. При использовании фазочувствительных выпрямительных схем можно получить индикацию направления перемещения якоря от среднего положения.
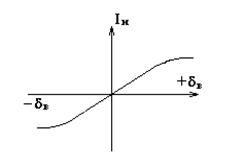
Характеристика ДИД с ФЧВ имеет вид:
Дата добавления: 2017-01-16; просмотров: 1824;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- Cила резания при точении
- Cущность организации и ее основные признаки
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- D-элементы, их применение в медицине и фармации.
- F50 Расстройства приема пищи
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
