Назначение, устройство и система управления промышленного робота М10П6201
Входящий в состав гибкого токарного модуля промышленный робот М10П6201 является автоматической многодвигательной машиной (манипулятором), снабжённой ЧПУ (рис. 1.57). Робот выполняет двигательные функции, аналогичные функциям руки человека: перенос заготовки с тактового стола на станок, установку заготовки в патрон, возвращение обработанной заготовки на тактовый стол, переустановку заготовки в патроне.
Основными частями робота являются: основание 1, закрепляемое на станине станка; узел 2 поворотов руки робота (см. рис. 1.57), блок 3 поворота устройства захвата 4; каретка 5 поступательного перемещения захвата. Захват заготовки 4 робота обладает шестью степенями свободы перемещения: четыре степени свободы обеспечиваются поворотом захвата по координатным направлениям A, B, C, a и две — поступательными перемещениями вдоль осей Y и Z.
Повороты по координатным направлениям А, В, С и перемещения руки робота по осям Y, Z осуществляют автономными приводами с электродвигателями постоянного тока 6, 7. Для поворотов «руки» (по углу a) предусмотрены пневмодвигатель и фиксатор угловых положений устройства захвата через каждые 900. На виде сверху (см. рис. 1.57, б) узел 2 поворотов руки робота повёрнут на 900.
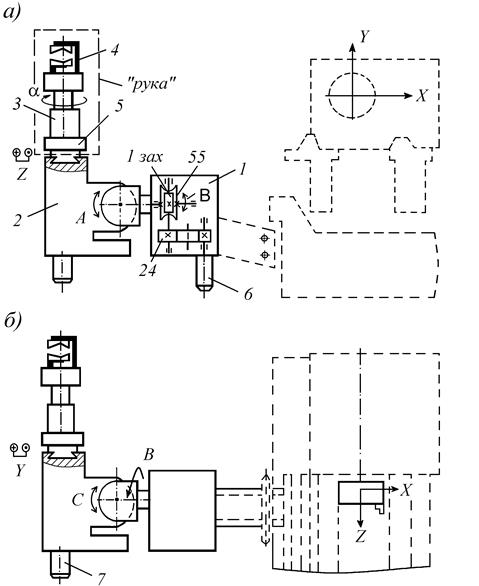
Рис. 1.57. Промышленный робот модели М10П6201
Система управления роботом содержит устройство формирования команд, устройство ввода программы и пульт ручного управления. Устройство формирования команд управляет приводами манипулятора и вырабатывает команды управления пинолью задней бабки, патроном, защитным ограждением токарного станка и перемещением тактового стола.
Управление роботом возможно в трёх режимах: «обучение», «повторение», «редактирование». При режиме «обучение» робот по командам оператора с пульта управления занимает нужную позицию, а данные об этой позиции автоматически вводятся в память устройства ЧПУ. На этом же этапе оператор вводит в память данные о скорости перемещений и последовательности выполнения функций захвата заготовки, перемещений пиноли станка, зажима и разжима патрона, подвода и отвода защитного ограждения станка. Режим «повторение» используют для работы робота при многократном выполнении заданной технологической операции. Режим «редактирование» предусмотрен для возможности исправления, замены или ввода новых данных в управляющую программу робота.
Содержание работы
Работа включает: изучение устройства и назначения гибкого токарного модуля и его составных частей, рассмотрение последовательности работы частей модуля и разработку траектории движения резца при изготовлении конкретной детали, определение технико-экономических параметров обработки: режима резания для каждого из участков заготовки и времени на цикл работы резца в соответствии с индивидуальным заданием; подготовку отчёта.
Дата добавления: 2021-05-28; просмотров: 726;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- B. Департаменты и управления функционального характера.
- DSM — система классификации Американской психиатрической ассоциации
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- Money Management - основы управления капиталом
- Єдина державна система цивільної оборони населення та територій

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
