Травмобезопасное рулевое управление
Для снижения травматизма водителей и снижения тяжести последствий фронтальных столкновениях автомобилей в рулевом управлении предусмотрены различные конструкции. Существуют травмобезопасные рулевые механизмы различных конструкций. Основная задача состоит в том, чтобы снизить силу, наносящего травму водителю, за счет поглощения энергии удара. Прежде всего на автомобиле устаналивается энергопоглощающее рулевое колесо. Представленная на рис. 9.5 конструкция рулевого колеса имеет утопленную ступицу и две спицы, что позволяет значительно снизить тяжесть травм при ударе о них грудью при слабом натяжении ремней безопасности или значительном перемещении в салон рулевого вала.
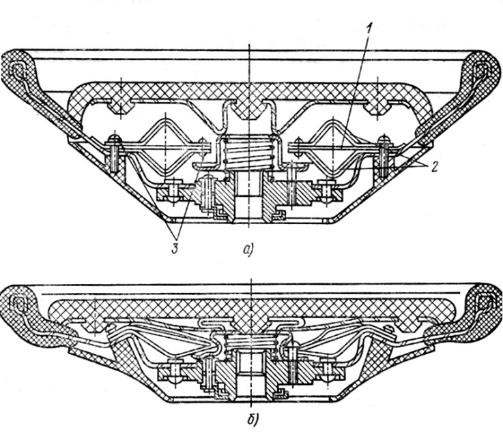
Рис 9.5. Энергопоглощающее рулевое колесо: а – в обычном состоянии; б – в деформированном состоянии.
В рулевом механизме устанавливаются специальные энергопоглощающие устройства, а рулевой вал в отдельных случаях выполняют составным из нескольких частей (рис. 9.6, 9.7). По способу уменьшения перемещения верхней части рулевой колонки внутрь кузова и поглощения энергии удара водителя о рулевое колесо существующие рулевые управления разделяют на несколько групп.
1. Уменьшающие только перемещение верхней части рулевой колонки внутрь кузова за счет расположения частей рулевого вала под углом одна к другой с установкой в местах пересечения осей шарниров или эластичных муфт.
2. Установкой в верхней части рулевого вала под рулевым колесом сильфона, деформирующегося при ударах.
3. Уменьшение перемещения рулевого вала и поглощение энергии удара за счет деформации элементов вала за счет несоосности и параллельности частей рулевого вала, соединенных разрушающимся элементом.
4. Уменьшение перемещения рулевого и поглощение энергии удара за счет разрушения и деформации сетчатой или сплошной гофрированной рулевой колонки.
5. Уменьшение перемещения рулевого вала и поглощение энергии удара за счет разрушения одной из сопрягаемых частей рулевого вала или рулевой колонки путем вдавливания при телескопированиив стенки наружной и внутренней труб колонки перекатывающихся стальных шариков.
6. Уменьшение перемещения рулевого вала внутрь кузова за счет телескопирования и поглощения энергии удара за счет трения частей рулевого вала, рулевой колонки или обеих частей.
На рис. 9.6 и 9.7 представлены некоторые варианты конструкции травмобезопасного рулевого управления.
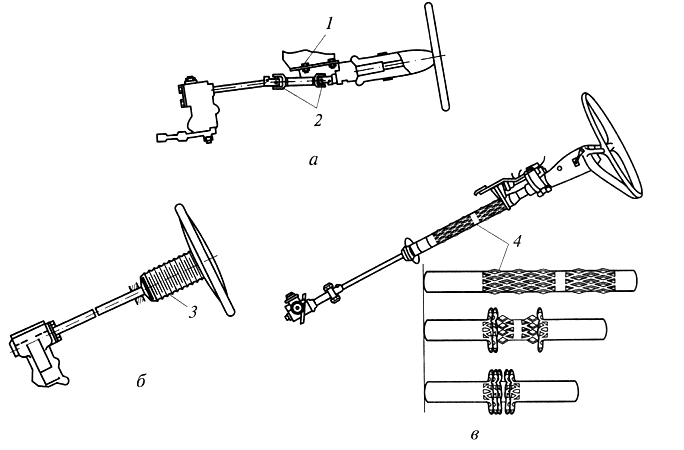
Рис. 9.6. Травмобезопасные рулевые механизмы: а – рулевой вал с карданными шарнирами; б – рулевой вал с энергопоглощающим сильфоном; в – рулевой вал с перфорированной трубой; 1 – кронштейн; 2 – карданная передача; 3 –гофрированный цилиндр; 4 - перфорированная труба
В рулевом механизме с карданным рулевым валом (рис. 9.6, а) при лобовом ударе карданные шарниры 2 складываются, что уменьшает перемещение конца вала в салон автомобиля, а кронштейн 1 деформирутся, за счет чего поглощается часть энергии удара.
В рулевом механизме с сильфоном (рис. 9.6, б) рулевое колесо с рулевым валом соединено с помощью гофрированного цилиндра 3, который при лобовых столкновениях деформируется, уменьшая перемещение рулевого вала в салон автомобиля и частично поглощая энергию удара.
Применяются и рулевые механизмы, у которых рулевой вал в верхней части выполняется в перфорированном виде (рис. 9.6, б). При столкновениях 4 перфорация деформируется в той последовательности, которая представлена на рисунке.
На рис. 9.7 представлен вариант травмобезопасного рулевого механизма с резиновой муфтой 3 и предохранительными пластинами 2, которые крепятся к фланцам 1 составного рулевого вала.
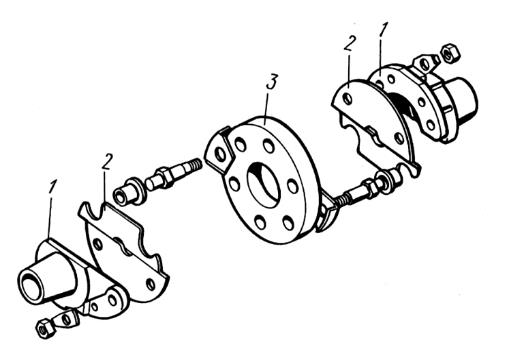
Рис. 9.7. Травмобезопасный рулевой механизм с резиновой муфтой и предохранительными пластинами
Согласно действующим нормативам, рулевое управление считается безопасным, если при испытаниях травмобезопасных рулевых механизмов при лобовом ударе о бетонный куб при скорости 48,3км/ч верхний конец рулевого вала не перемещается в горизонтальном направлении более чем на 127мм, а при ударе со скоростью 24,1км/ч усилие на рулевую колонку не превышает 11350н.
Рулевые механизмы
Рулевой механизм служит для увеличения усилия, создаваемого водителем на рулевом колесе, и преобразования вращательного движения в поступательное движение рулевого привода.
Передаточное число рулевого механизма для различного типа автомобилей составляет 15…25, что позволяет за один-два полных оборота рулевого колеса повернуть управляемые е колеса на максимальный угол 350…450.
Кроме общих требований к рулевым механизмам предъявляются и специальные требования, согласно которым рулевой механизм должен обеспечить:
• высокое значение прямого КПД и меньшее значение обратного КПД;
• обратимость рулевого управления, не снижающую способность стабилизации управляемых колес;
• минимальный зазор в механизме при нейтральном положении управляемых колес и возможность его регулировки;
• заданную характеристику передаточного отношения механизма.
На автомобилях применяются рулевые механизмы различного типа (рис. 9.8).
| Типы рулевых механизмов |
| Червячные |
| Винтовые |
| Зубчатые |
| Червяк –глобоидный ролик |
| Червяк – сектор |
| Винторычажный |
| Винтореечный |
| Шестеренчатый |
| Реечный |
Рис. 9.8. Типы рулевых механизмов
Наибольшее распространение на легковых и грузовых автомобилях получили червячно-роликовые рулевые механизмы (рис. 9.9) за счет высокого прямого КПД и малого обратного КПД. Высокое значение КПД обусловлено тем, что контактирующие поверхности обкеатываются друг по другу, а не скользят. По сравнению с другими червячными механизмами эта конструкция более компактна.
При нейтральном положении рулевого колеса передаточное отношение рулевого механизма червячно-роликового типа определяется по формуле:
Uрм =  , (9.12)
, (9.12)
где r0 – начальный радиус глобоиды в наименьшем сечении;
tч – шаг винтовой линии червяка;
zч – число заходов червяка.
При повороте рулевого колеса от нейтрального положения передаточное отношение рулевого механизма червячно-роликового типа возрастает на 5%…7%.
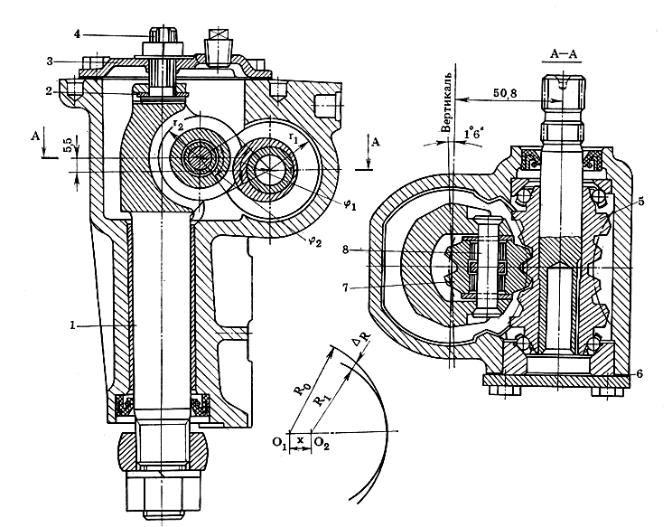
Рис. 9.9. Рулевой механизм типа глобоидный червяк-двухгребневый ролик
На рис. 9.9 представлена конструкция рулевого механизма типа глобоидный червяк-двухгребневый ролик автомобилей ВАЗ. В нем глобоидный червяк 5 напрессован на вал, установленный на двух шариковых радиально-упорных подшипниках, регулируемых прокладками 6. Червяк находится в зацеплении с двухгребневым роликом 7, установленным на оси 8на иглльчатом подшипнике. Для обеспечения регулировки зацепления ось 8 ролика 7 смещена по отношению к оси червяка на 5…7мм. Регулировка осуществляется винтом 4, ввернутым снаружи в рулевого механизма в верхнюю крышку картера 3. Головка винта с регулировочной шайбой 2 входит в паз головки вала сошки 1. Осевой зазор между головкой винта и пазом вала должен быть не более 0,05мм. Прямой и обратный КПД такого рулевого механизма составляют следующие значения: ηрм = 0,85 и ηмр =0,70.
Рулевые механизмы червячно-секторного типа (рис.9.10 и 9.11) получили распространение на грузовых автомобилях.
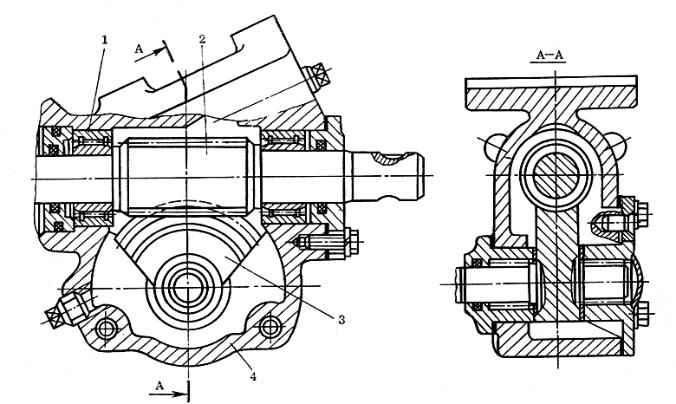
Рис.9.10. Рулевой механизм типа цилиндрический червяк-центральный сектор
В рулевом механизме типа цилиндрический червяк-центральный сектор цилиндрический червяк 2, установленный на подшипниках 1 в корпусе 4 находится в зацеплении с центральным червячным сектором 3. Такой рулевой механизм имеет сравнительно большие габариты и массу. В нем затруднено обеспечение необходимой регулировки зацепления. За счет того, что контактирующие поверхности скользят друг по другу, прямой КПД не превышает ηрм = 0,7, а обратный КПД – ηмр = 0,55.
Передаточное число такого рулевого механизма определяется по формуле:
Uрм =  , (9.13)
, (9.13)
где z1 – число заходов червяка;
z2 – число зубьев всего червячного колеса, частью которого является данный центральный сектор.
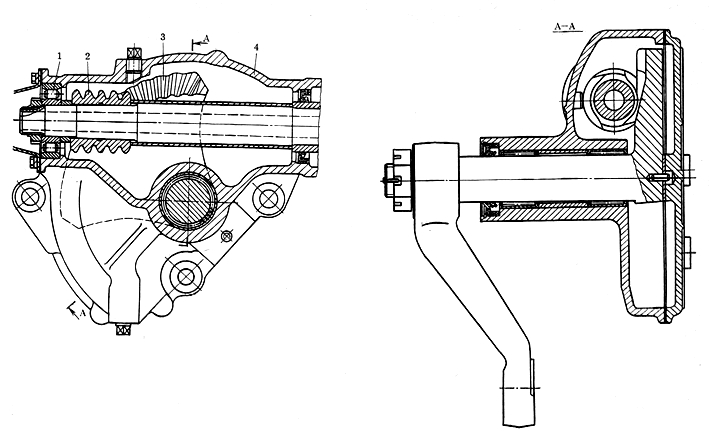
Рис. 9.11. Рулевой механизм типа цилиндрический червяк-боковой сектор
В рулевом механизме типа цилиндрический червяк-боковой сектор цилиндрический червяк 2, установленный на подшипниках 1 в корпусе 4 находится в зацеплении с боковым сектором 3. Такой рулевой механизм имеет по сравнению с предыдущей конструкцией меньшие габариты и массу. Регулировка зацепления осуществляется подбором толщины бронзовой шайбы, установленной между опорной поверхностью сектора и боковой крышкой картера. Осевой зазор в зацеплении при повороте вала сошки из среднего положения в крайнее изменяется от 0,03 до 0,5мм. Поскольку и в этом рулевом механизме поверхности скользят друг по другу, прямой КПД не превышает ηрм = 0,7, а обратный КПД – ηмр = 0,5.
В рулевом механизме данного типа цилиндрический червяк нарезается с постоянным шагом t и передаточное отношение определяется по формуле:
Uрм =  ×
×  , (9.14)
, (9.14)
где rω – радиус начальной окружности цилиндрического червяка;
z1 – число заходов червяка;
γ1 и γ2 – углы наклона винтовой линии червяка и зубьев червячного сектора.
Винтовые рулевые механизмы используются на тяжелых грузовых автомобилях и, как правило, в сочетании с зубчатыми. На рис. 9.12 представлена конструкция винто-реечного рулевого механизма типа винт-гайка-рейка-сектор. В этом рулевом механизме трение скольжения заменено на трение качения, для чего между винтом и гайкой размещены 90…120 шариков, циркулирующих в замкнутом направляющих трубках 4. Вращение винтового вала 6 преобразуется в поступательное движение гайки-рейки 5 и далее во вращательное движение зубчатого сектора и вала сектора 1. Регулируется данное зацепление вращением винта 2, сферическая головка которого упирается в шайбу 3. При этом сектор вместе с валом сошки смещаются и зазор в зацеплении уменьшается. Прямой и обратный КПД такого рулевого механизма составляют следующие значения: ηрм = 0,87 и ηмр =0,82.
Передаточное отношение такого рулевого механизма определяется по формуле:
Uрм =  , (9.15)
, (9.15)
где r0 – радиус начальной окружности зубьев сектора;
hВ – шаг винта.
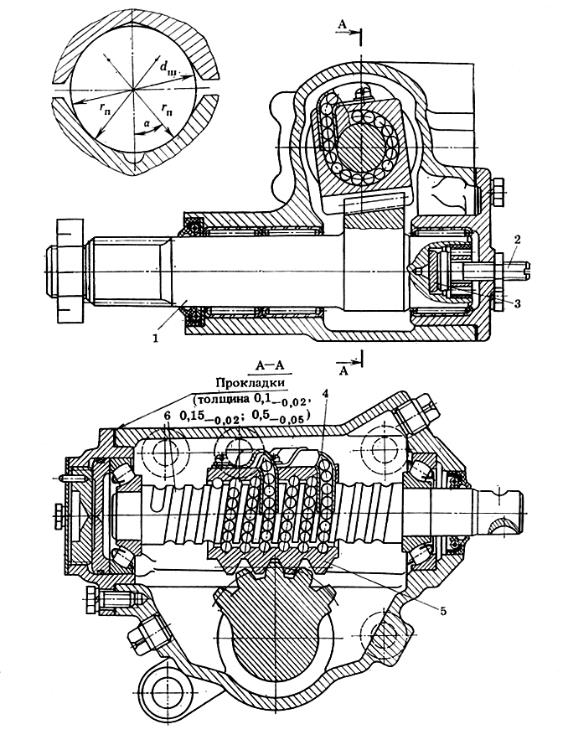
Рис. 9.12. Рулевой механизм типа винт-гайка-рейка-сектор
Винто-рычажные рулевые механизмы не получили широкого применения, так как имеют низкое значение КПД и при высокой склонности к износу не обеспечивают возможность регулирования зазора в зацеплении.
Зубчатые (реечные) рулевые механизмы в отдельном виде применяются в легковых автомобилях малого и среднего класса. На грузовых автомобилях в рулевых механизмах в сочетании с другими видами зацепления применяются цилиндрические или конические передачи.
Реечный рулевой механизм (рис. 9.13) выполняется в виде зубчатого редуктора, в котором вращение от рулевого колеса через рулевой вал 1 передается шестерне 2. Вращательное движение шестерни преобразуется в поступательное движение рейки 3 и далее рулевых тяг. Преимуществом такого механизма является простота и компактность конструкции, высокий прямой КПД (ηрм =0,90…0,95). Вместе с тем, из-за высокого значения обратного КПД (ηмр =0,90…0,95) такие рулевые механизмы не поглощают толчки, передаваемые от дороги на рулевое колесо, поэтому они применяются на легковых автомобилях малого класса. На легковых автомобилях с более высокого класса необходимо устанавливать рулевые усилители, которые поглощение толчков принимают на себя.
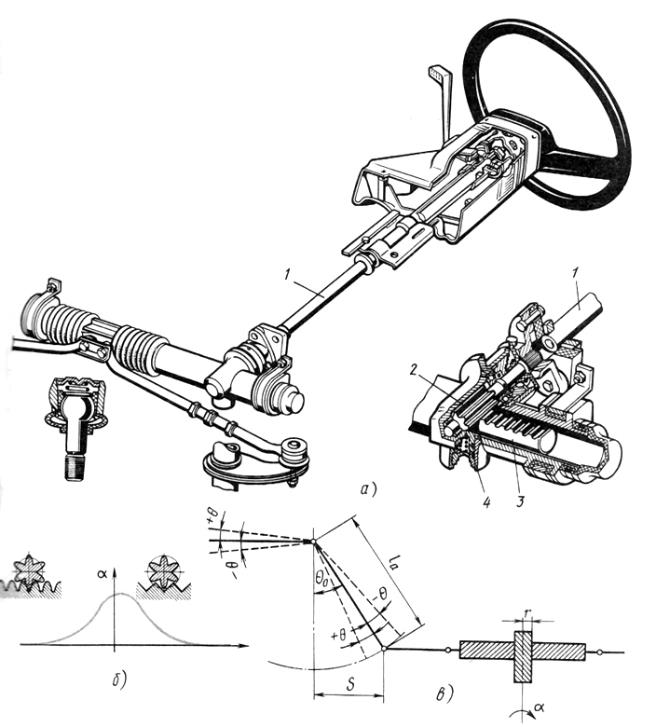
Рис. 9.13. Реечный рулевой механизм: а – конструкция; б – характеристика передаточного отношения; в – схема к определению передаточного отношения рулевого управления
Угловое передаточное отношение рулевого управления определится из зависимости:
uω =  =
=  , (9.16)
, (9.16)
где lа – длина поворотного рычага;
θ0 – угол среднего положения поворотного рычага;
θ – угол поворота управляемых колес;
r – радиус шестерни.
Поскольку значение угла θ меняется, передаточное отношение рулевого управления с реечным механизмом переменно.
Усилие, передаваемое от рулевого колеса на рейку определится из соотношения:
Pр =  , (9.17)
, (9.17)
где Pрк – усилие на рулевом колесе;
Rрк – радиус рулевого колеса;
rω – радиус начальной окружности шестерни.
Рулевой привод
Дата добавления: 2021-05-28; просмотров: 905;
Поиск по сайту
Узнать еще
- D-триггер с динамическим управлением
- IV. 7. Управление состоянием окружающей среды на локальном уровне
- IX.2. Биотическое управление экосферой и роль деятельности человека
- Аварийное управление мощностью турбин электростанций
- АВАРИЙНОЕ УПРАВЛЕНИЕ ПС ОДНОЙ СЕКЦИИ.
- Автомаическое управление машинами циклического действия
- Автоматические системы с комбинированным управлением
- Автоматическое управление

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
