Требования, предъявляемые к рулевому управлению, и его основные характеристики
К рулевому управлению предъявляются повышенные требования, поскольку оно существенно влияет на управляемость, маневренность, устойчивость и безопасность автомобиля. К перечню общих требований к конструкции автомобиля к рулевому управлению предъявляются специальные требования, в соответствии с которыми оно должно обеспечивать:
• минимальный радиус поворота для обеспечения высокой маневренности автомобиля;
• соответствие между углом поворота рулевого колеса и управляемых колес;
• пропорциональность между усилием на рулевом колесе и сопротивлением повороту управляемых колес;
• легкость управления;
• минимальную передачу толчков и ударов со стороны дороги на рулевое колесо;
• исключение автоколебаний управляемых колес вокруг оси поворота;
• минимальное влияние на стабилизацию управляемых колес;
• обеспечение травмобезопасности водителя при лобовых столкновениях.
Минимальный радиус поворота автомобиля оценивается расстоянием от центра поворота до сдо средней вертикальной плоскости наружного кправляемого колеса при его максимальном повороте. Значения минимального радиуса поворота регламентируются Правилом №36 ЕЭК ООН, действующим и на территории России. Этот радиус непременно указывается в технической характеристике и его значение обычно составляет 2,0…2,5 базы автомобиля. Обычно минимальный радиус поворота определяется экспериментально при движении автомобиля со скоростью 5км/ч и при максимальном повороте управляемых колес.
Если известны углы бокового увода управлемых. значение минимального радиуса поворота можно определить путем расчета с помощью следующей формулы:
Rmin =  , (9.1)
, (9.1)
где Rδ =  – радиус поворота автомобиля с учетом бокового увода шин;
– радиус поворота автомобиля с учетом бокового увода шин;
B1 – колея передних колес автомобиля;
Θmax - максимальный угол поворота управляемых колес;
δ1 и δ2 – углы бокового увода управлемых колес;
L – база автомобиля.
Угловое передаточное число рулевого управления представляет собой отношение угла поворота рулевого колеса αрк к среднему углу поворота управляемых колес θ:
uру =  , (9.2)
, (9.2)
где θ =  - угол поворота управляемых колес;
- угол поворота управляемых колес;
θв - угол поворота внутреннего колеса;
θн – угол поворота наружного колеса.
Значение углового передаточного числа переменное и зависит от передаточных значений рулевого механизма uрм и рулевого привода uрп и равно их произведению:
uру = uрм uрп.
От значения этого передаточного отношения, часто называемым педаточным числом рулевого управления, зависят упраляемость, маневренность и безопасность движения.
Передаточным числом рулевого механизма называется отношение угла поворота рулевого колеса αрк к углу поворота рулевой сошки αрс:
uрм=  . (9.3)
. (9.3)
Рулевые механизмы автомобилей могут иметь как постоянное значение передаточного числа, так и переменное (рис. 9.3). Численное значение они имеют uрм= 13…22 для легковых и uрм= 20…25 для грузовых автомобилей.
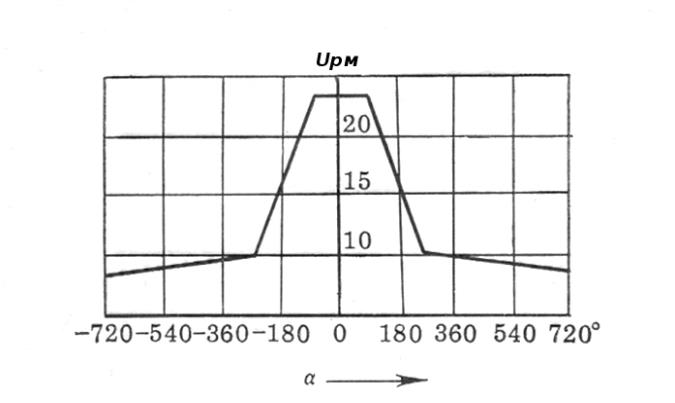
Рис. 9.3. Характеристика рулевого механизма при переменном передаточном отношении
При переменном передаточном числе uрм большие его значения достигаются в интервале изменения угла поворота рулевого колеса αрк от – 900 до +900. В этом случае угол поворота рулевой сошки αрс минимальный, поскольку αрс = αрк/ uрм, что обеспечивает большую безопасность движения. Попорот автомобиля на большой угол (± 2700…7200), совершаемый при малых скоростях, будет происходить быстрее, поскольку при уменьшении значения uрм увеличивается угол поворота рулевой сошки αрс.
Передаточным числом рулевого привода называется отношениеуглу поворота рулевой сошки αрс к углу поворота управляемых колес θ:
uрп =  . (9.4)
. (9.4)
Для определения передаточного отношения рулевого привода можно использовать отношение плеч рычага поворотного кулака lпр и рулевой сошки lрс:
uрп =  (9.5)
(9.5)
Поскольку при осуществлении поворота длина плеч рычагов меняется, то и передаточное отношение рулевого привода не остается постоянным. Численное значение передаточного отношения рулевого привода автомобилей составляет 0,85…1,10.
Поскольку в рулевом управлении имеет место деформация деталей, жесткая кинематическая связь нарушается. Поэтому при одинаковом повороте рулевого колеса в сравнении с жестким рулевым управлением управляемые колеса повернут на меньший угол. Поэтому, наряду с угловым передаточным числом, вводят понятие кинематическое передаточное число рулевого управления, характеризующее жесткую связь между углами поворота рулевого колеса и управляемых колес. Угловое передаточное число всегда будет больше, чем кинематическое. В свою очередь угловое передаточное число, учитывающее упругую податливость рулевого управления называют динамическим передаточным числом рулевого управления. Угловая жесткость рулевого управления легковых автомобилей составляет 1,0…3,5град/Нм. У грузовых автомобилей значениеэтого параметрва выше.
Силовым передаточным числом рулевого управления называется отношение суммы сил сопротивления повороту управляемых колес Рсп к усилию, приложенному на рулевом колесе Ррк:
uc =  . (9.6)
. (9.6)
В практических расчетах чаще используют отношение момента сопротивления повороту управляемых колес Мсп и момента на рулевом колесе:
uс =  . (9.7)
. (9.7)
С помощью силового передаточного числа оценивается легкость управления автомобилем
по усилию, требующемуся для его поворота.
На стадии проектирования автомобиля в расчеты закладывают максимальное усилие на рулевом колесе не более 120Н и минимальное не менее 60Н. Ограничение минимального усилия на рулевом колесе связано с необходимостью обеспечить для водителя «чувство дороги». При проверке усилия на рулевом колесе неподвижного автомобиля оно не должно превышать 400Н на асфальтобетонном покрытии.
Легкость и удобство управления автомобилем в значительной степени зависит от размеров (диаметра) рулевого колеса. Чем больше диаметр, тем меньше уилие на рулевом колесе, но одновременно увеличивается угол порота рулевого колеса для поворота управляемых колес на тот же угол. Диаметр рулевого колеса зависит от типа автомобиля и составляет для легковых автомобилей 380…425мм и для грузовых автомобилей 440…550мм.
Для поворота управляемых колес от среднего в крайнее положение в обе стороны требуется повернуть рулевое колесо на угол 5400…10800, что составляет 1,5…3 оборота.
Легкость управления автомобилем, значение усилий, передаваемых от управляемых колес к рулевом колесу определяется величиной прямого ηру и обратного ηур КПД рулевого управления.
Прямой КПД характеризует потери мощности при передаче усилий от рулевого колеса к управляемым колесам ηру и определяется как произведение КПД рулевого механизма ηрм и КПД рулевого привода ηрп:
ηру = ηрм ηрп. (9.8)
Чем выше значение прямого КПД, тем меньше потери на трение в рулевом механизме и рулевых шарнирах и легче управление автомобилем. Численное значение прямого КПД, в зависимости от конструкции рулевого механизма и привода, составляет ηру = 0,65…0,85.
Обратный КПД характеризует потери мощности при передаче усилия от управляемых колес к рулевому колесу. Чем меньше значение этого КПД, тем меньше передаются удары и тлчкиот неровностей дороги на руки водителя. Численное значение обратного КПД, в зависимости от конструкции рулевого механизма и привода, составляет ηур = 0,58…0,65. Вместе с тем, значение обратного КПД должно быть выше предела обратимости рулевого управления, чтобы сохранить у водителя чувство дороги и обеспечить стабилизацию управляемых колес.
Легкость управления зависит от прямого КПД рулевого механизма, так как в нем происходит основная часть потерь на трение. Прямой КПД рулевого механизма ηрм определяется из соотношения:
ηрм = 1 -  , (9.9)
, (9.9)
где Мтр1 – момент трения рулевого механизма, приведенный к рулевому колесу.
Значение сил ударов от дороги на рулевое колесо зависит от величины обратного КПД ηмр, определяемого из отношения:
ηмр = 1 -  , (9.10)
, (9.10)
где Мтр2 – момент трения рулевого механизма, приведенный к валу рулевой сошки.
Значения прямого и обратного КПД для червячных и винтовых рулевых механизмов
могут быть определены по формулам:
ηрм =  ; (9.11)
; (9.11)
ηмр =  , (9.
, (9.  )
)
где β – уголо подема винтовой линии червяка или винта;
ρ – угол трения.
Численные значения прямого и обратного КПД различных типов рулевых механизмов сосоставляют ηрм = 0,60…0,95 и ηмр = 0,55…0,85.
КПД рулевого привода складывается из потерь на трение во всех рулевых шарнирах и его значения составляют ηрп = 0,92…0,95.
Для улучшения управляемости автомобиля, предотвращения виляния управляемых колес зазор в рулевом управлении должен быть минимальным. Определяется этот зазор по углу свободного вращения рулевого колеса при нейтральном положении управляемых колес и складывается он из зазора в рулевом механиезме и рулевом приводе. Допустимый зазор для новых автомобилей составляет 100…150 свободного поворота рулевого колеса.
Поскольку большую часть времени автомобиль движется прямолинейно или с малым поворотом управляемых колес, наибольший износ контактирующих поверхностей рулевого механизма и рулевого привода происходит при малых углах поворота рулевого колеса.
Для устранения повышенного зазора в рулевом механизме предусматривается регулировка. Для исключения заклинивания рулевого механизма после регулировки зазор в зацеплениии при повороте рулевого колеса от нейтрального положения должен быть больше, чем в центре, и в конце составлять 250…350 свободного поворота рулевого колеса.
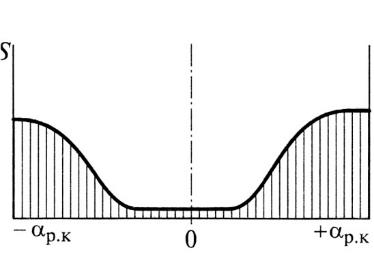
Рис. 9.4. Изменение зазора в рулевом механизме в зависимости от поворота рулевого колеса
Дата добавления: 2021-05-28; просмотров: 634;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- B) в угле Интинского месторождения и продуктах его сжигания.
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Общая характеристика категории состояния как часть речи
- I. Товар и его свойства.
- II. ГОСУДАРСТВЕННЫЙ ДОЛГ И ПУТИ ЕГО ПОГАШЕНИЯ
- II. Движение поездов на однопутных перегонах

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
