Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK
Для оптимизации параметров регулятора давления воспользуемся пакетом прикладных программ для построения систем управления Check Step Response Characteristics, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с SIMULINK, автоматически настраивает параметры моделируемых систем, основываясь на определённых пользователем ограничениях на их временные характеристики. Типовой сеанс в среде SIMULINK с использованием возможностей и блоков Check Step Response Characteristics состоит из ряда стадий.
Очевидно, что статическую ошибку данной системы не получится устранить введением только регулятора, в связи с малым коэффициентом передачи датчика обратной связи. Необходимо, ввести последовательно с датчиком обратной связи звено, которое обеспечивало бы, коэффициент передачи по цепи обратной связи равный 1, т.е. установить нормирующий преобразователь (рис. 49) с передаточной функцией:
 .
.
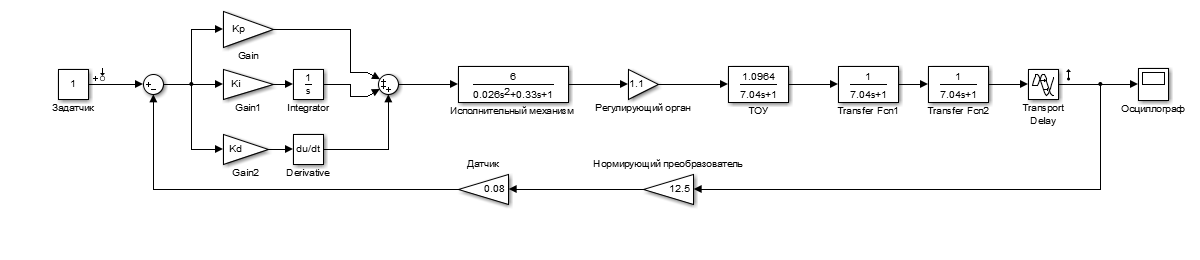
Рисунок 49– Структурная схема автоматизированной системы регулирования давления с нормирующим преобразователем
Начальной стадией является создание модели исследуемой системы из стандартных блоков (рис. 50).
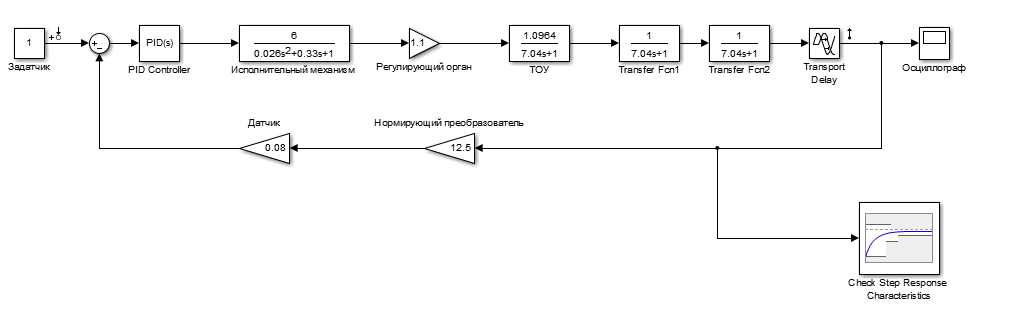
Рисунок 50 – Схема АСР для определения оптимальных параметров настройки ПИД – регулятора
Вызвав окно блока оптимизации Check Step Response Characteristics, задаем необходимые параметры, подлежащие автоматической настройке (рис. 51):
· перерегулирование (Overshoot) менее 10%;
· установившееся значение выходной величины (Final value) 1.
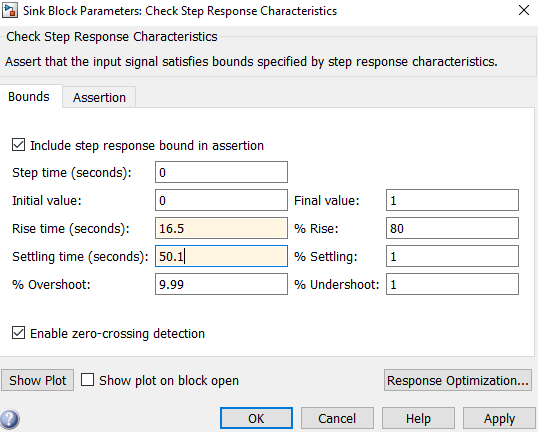
Рисунок 51 – Окно Check Step Response Characteristics
Кнопка Show Plot блока Check Step Response Characteristics вызывает допустимый коридор изменения выходного сигнала (рис. 52) в соответствии с установленными значениями показателей качества управления.
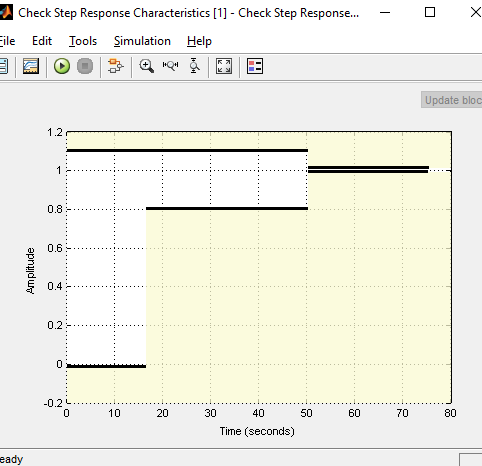
Рисунок 52 – Коридор параметров оптимизации
На структурной схеме АСР открывает окно настройки ПИД-регулятора и вводим символьные переменные Kp, Ki и Kd (рис. 53).
В рабочем пространстве MATLAB указываем либо начальные настроечные коэффициенты, которые получили в результате предварительных расчетов (раздел 2.3.1), либо присваиваем всем коэффициентам значение 1:
>> kp=1
kp = 1
>> ki=1
ki = 1
>> kd=1
kd = 1
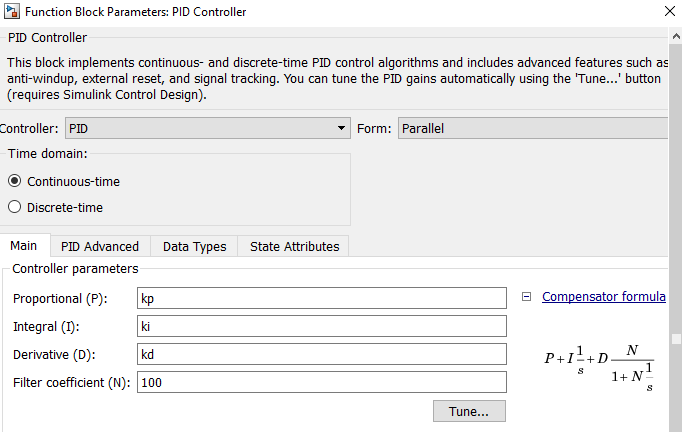
Рисунок 53 – Ввод символьных имен коэффициентов PID регулятора, подлежащих автоматической настройке
Далее переходим на вкладку Response Optimization, открыв окно Design Response Optimization из меню Sink Block Parameters: Check Step Response Characteristics. Поочередно импортируем данные из Used By, выделяя их и перемещая в набор переменных для оптимизации Create Design Variables set, с помощью кнопки «стрелка» (рис. 54).
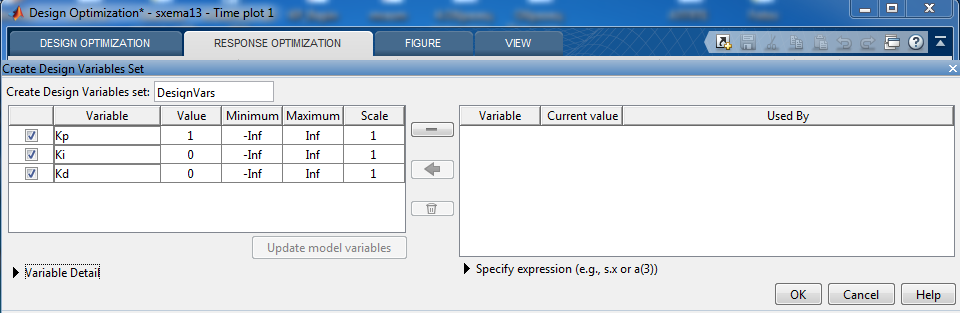
Рисунок 54 – Ввод символьных имен коэффициентов, подлежащих автоматической настройке
По нажатию кнопки Optimize запускается процесс оптимизации. В случае, если вычислительный процесс сходится, т.е. система в соответствии с установленными показателями качества вычислила значения Kp, Ki и Kd , на экран выводится график переходного процесса в форме «коробочки Солодовникова» (рис. 55).
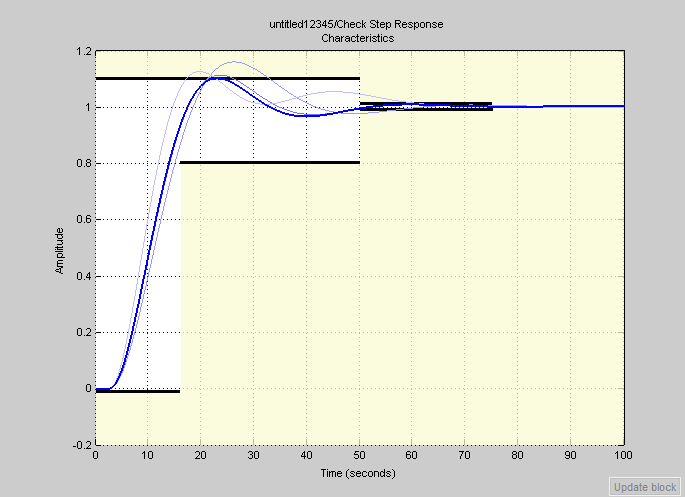
Рисунок 55 – График после оптимизации значений Kp, Ki и Kd
В итоге автоматического расчета в пакете Check Step Response Characteristics оптимальные значения коэффициентов ПИД-регулятора (рис. 56) составили: Kp=1,5111, Ki=0,0143 и Kd=0,2724.
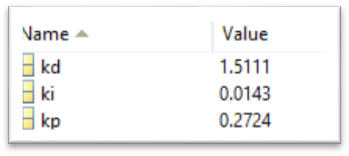
Рисунок 56 – Расчётные значения коэффициентов ПИД – регулятора
Для проверки полученных результатов синтеза регулятора системы автоматического регулирования давления в ресивере постоим график переходного процесса (рис. 57) и определим значения показателей качества, введя значения настроек каналов регулятора.
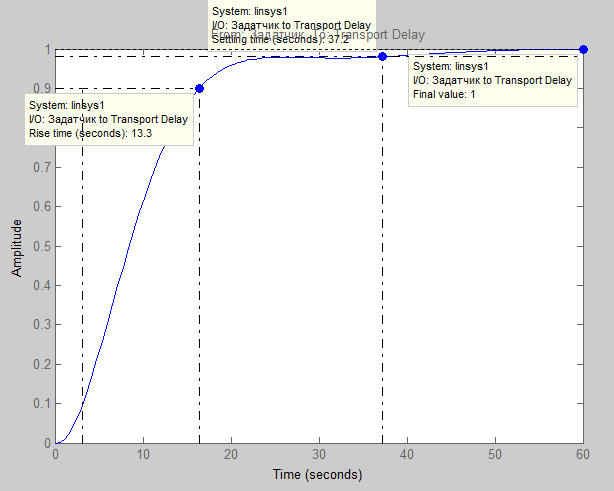
Рисунок 57 – Переходная характеристика АСР с настроенным ПИД-регулятором
Характеристики модели АСР с оптимальными значениями настроек ПИД- регулятором при подаче на вход единичной ступенчатой функции:
- время нарастания (Rise time) – 13,3 с.;
- время переходного процесса (Setting time): 37,2 с.;
- установившееся значение выходной величины (Final value): 1;
- ошибка регулирования Εст = 1 − 1 = 0;
- перерегулирование (Overshoot) составляет: 0%.
Для разомкнутой системы строим частотные характеристики: ЛАХ, ЛФХ (рис. 58) и АФХ (рис. 59).
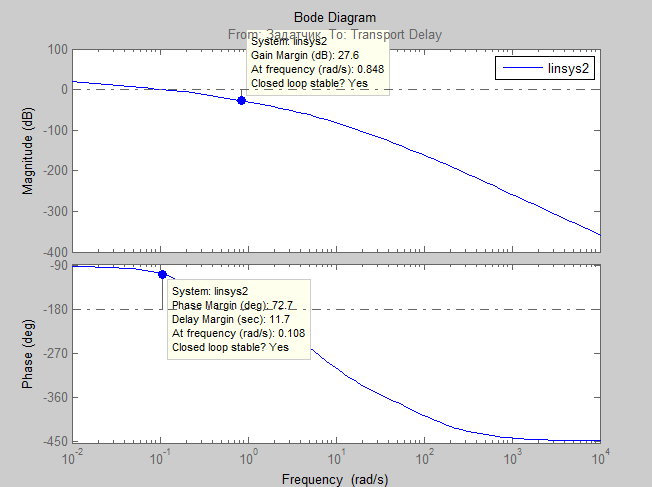
Рисунок 58 – ЛАХ и ЛФХ характеристики АСР с настроенными значениями каналов ПИД-регулятора
Автоматически система определяет значения запасов устойчивости:
- по амплитуде (Gain Margin): 27,6 дБ;
- по фазе (Phase Margin): 72,7.
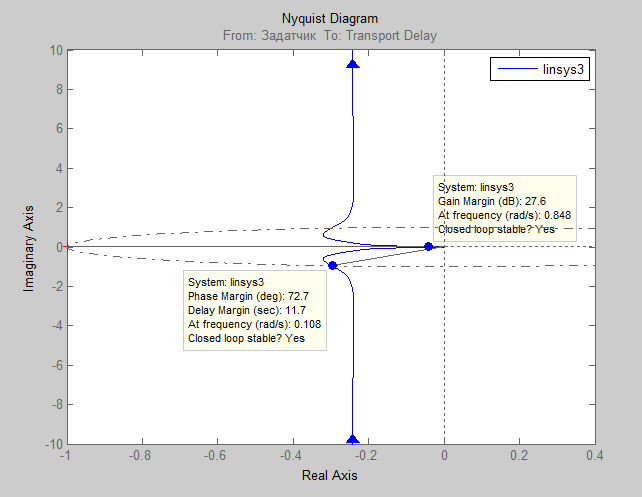
Рисунок 59 – АФХ характеристики АСР с настроенными значениями каналов ПИД-регулятора
ЗАКЛЮЧЕНИЕ
Основу теории автоматического управления составляют математические модели, отражающие взаимосвязь элементов систем автоматического управления друг с другом и с внешней средой. Построение моделей управления технологическими процессами и элементов систем управления возможно либо на основе теоретических исследований, либо путем эксперимента. Для большинства технологических объектов управления не получено достаточно достоверных моделей, что обосновывает актуальность автоматизированного решения проблем идентификации с использование специализированного ПО.
Изложенный в учебном пособии материал позволяет выполнить экспериментально-теоретической идентификацию (отождествления) структуры и параметров математической модели ТОУ, обеспечивающей близость выходных значений модели и объекта при наличии на входе одних и тех же входных сигналов. Используя встроенные инструменты System Identification Toolbox приложения Simulink программного продукта MATLAB R2013b на примере объекта технологического управления для производство фенола, ацетона и каучука, выполнен сравнительный анализ различных статистических методов идентификации систем автоматического управления в динамическом режиме на основе процента адекватности.
Используя полученную математическую модель ТОУ решены задачи анализа и синтеза регулятора, т.е. обоснован выбор структуры и параметров управляющего устройства, при которых система автоматического управления удовлетворяет заданным требованиям к качеству. Предложенные в учебном пособии рекомендации к выбору закона регулирования и аналитическому расчету настроечных коэффициентов позволяют верифицировать рассчитанные программой значения.
Для расширенного изучения вопроса идентификации рекомендуется воспользоваться литературой, приведенной в списке литературы.
В качестве прикладной программы рекомендуется использовать пакетные приложения Simulink и System Identification Toolbox программного продукта MATLAB R2013b.
В результате введения в систему ПИД - регулятора и расчета оптимальных значений параметров по различным методиками (приближенным аналитическим, экспериментальным и с помощью специализированного программного приложения System Identification Toolbox пакета MATLAB R2013b.) были получены следующие показатели качества системы:
- время регулирования (Rise time) уменьшилось с 16,5 с до 13,3 с;
- время переходного процесса (Setting time) уменьшилось с 50,1 с до 37,2 с;
- установившееся значение выходной величины (Final value) изменилось с 4,58 до 1;
- перерегулирование (Overshoot) уменьшилось с 7,02 до 0%;
- абсолютное значение статической ошибки уменьшилась с 3,58 до 0;
- запас по амплитуде (Gain Margin) увеличился с минус 0,23 до 27,6 дБ;
- запас по фазе (Phase Margin) увеличился с минус 0,98° до 72,2°.
С учетом полученных численных значений критериев качества можно сделать вывод, о том, что выбранные настроечные коэффициенты и структура регулятора обеспечивают необходимые свойства АСР давления в ресивере.
Список литературы
1. Федеральный закон от 21.07.1997 N 116-ФЗ (ред. от 03.07.2016) "О промышленной безопасности опасных производственных объектов"
2. Руппель А-р.А., Руппель А.А., Пастухова Е.И., Щербаков В.С. Идентификация объектов автоматизации технологических процессов в среде MATLAB: Учебное пособие – Омск: Филиал ГОУ ВПО «Российский заочный институт текстильной и легкой промышленности» в г. Омске, 2009. – 74 с.
3. Руппель А.А. Анализ и синтез систем автоматизации технологических процессов: Учебное пособие. – Омск: Изд-во Сиб АДИ, 2007. – 86 с.
4. Евстафьев В.В., Енгибарян И.А., Сахаров И.А. Основы конструирования и технологии производства РЭС: учебное пособие по дисциплине «Основы конструирования и технологии производства РЭС» / В.В. Евстафьев, И.А. Енгибарян, И.А. Сахаров. ‒ М.: Издательский дом Академии Естествознания, 2016. – 92 с.
5. Вычислительные методы. Теория и практика в среде MATLAB. Для высших учебных заведений. Курс лекций / К.Э. Плохотников. – Издательство: Горячая Линия – Телеком, 2009. – 496 с.
6. Новиков, С. И. Практическая идентификация динамических характеристик объектов управления теплоэнергетического оборудования: Учеб. пособие – Новосибирск: Изд - во НГТУ, 2004. – 64 c .
7. Дрейзин В.Э. Управление качеством электронных средств: учебное пособие для студ. высш. учеб. заведений / В.Э. Дрейзин, А.В. Когура. – М.: Издательский центр «Академия», 2010. –288с.
8. Новиков, С. И. Оптимизация автоматических систем регулирования теплоэнергетического оборудования: учеб. пособие. – Новосибирск: Изд - во НГТУ, 2006. Ч.1. – 108 с.
9. Методы классической и современной теории автоматического управления : учебник в 5 тт. Т.4: Теория оптимизации автоматического управления / под ред. К. А. Пупкова и Н.Д. Егупова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004. – 744 с.
10. Balas, G.L. Analysis and Synthesis Toolbox – for use with MATLAB / Balas, G.L. [and oth.] - MUSEN and The MathWorks, Inc..
11. Дудников, Е. Г. Основы автоматического регулирования тепловых процессов / Е. Г. Дудников - М.: госэнергоиздат., 1956. – 264 с.
12. Ротач, В. Я. Теория автоматического управления: Учебник для вузов. – 3 - е изд., М.: Издательство МЭИ, 2005. – 400 с.
13. Astrom K. J. Advanced PID control/ K. J. Astrom, T. Hagglund – ISA (The instrumentation, Systems, and Automation Society), 2006 – 460 с.
14. Беспалов А.В., Харитонов Н.И. Системы управления химико-технологическими процессами: Учебник для вузов. М.: ИКЦ "Академкнига", 2005. - 307 с.
15. Раппопорт Э. Я. Аналитическое конструирование агрегированных регуляторов в системах с распределенными параметрами // Изв. РАН. Теория и системы управления, 2012. – № 3. – С. 38 – 54.
16. Хлебников, М. В. Оптимизация линейных систем при ограниченных внешних возмущениях (техника инвариантных эллипсоидов) / М. В. Хлебников, Б. Е. Поляк, В. М. Кунцевич// Автоматика и телемеханика, 2011. – № 11. – С. 9 – 59.
17. Летов, А. М. Динамика полета и управление / А. М. Летов. М.: Наука, 1969. – 360 с.
18. Бараксанов, Ю. П. ПИД - регуляторы в системах автоматического регулирования/ Ю. П. Бараксанов, Н. Н. Попов // пособие для курсов.
19. Потрнягин, Л.С. Математическая теория оптимальных процессов / Л. С. Потрнягин. М.: Наука, 1969. – 384 с.
20. Пупков, К. А. Синтез оптимального управления динамическим объектом со случайными начальными значениями / К. А. Пупков, С. Ф. Фам, А. И. Дивеев// Наука и образование, 2012. –№ 3. http://technomag.edu.ru/doc/376455.html
21. Синергетические методы управления сложными системами: механические и электромеханические системы / под общ. Ред. А. А. Колесникова. М.: КомКнига, 2006. –304 с.
22. Современная прикладная теория управления: синергетический подход в теории управления // под ред. А. А. Колесникова. Ч. II. Таганрог: Изд-во ТРГУ, 2000. – 559 с.
23. Дивеев, А. И. Численный метод сетевого оператора для синтеза системы управления с неопределенными начальными значениями // Изв. РАН. Теория и системы управления, 2012. – № 2. – С. 63 – 78.
24. Соболь, И. М. Выбор оптимальных параметров в задачах со многими критериями: учебное пособие для вузов. // И.М. Соболь, Р.Б. Статников // М.: Дрофа, 2006. – 175 с.
25. Кузнецова, О. А. Адаптивный метод исследования пространства параметров. Тула: Изд-во Тул-ГУ, 2012. – 288 с.
26. Сушкин В. А. Применение многокритериальной оптимизации на основе точек Соболя // Сб. научных трудов SWorld по материалам международной научно-практ. конф. Одесса : КУПРИЕНКО, 2013. Т.9. – Вып. 1. – С. 19 – 21.
27. Грязев М. В. Применение ЛПt - последовательности при оптимизации динамического объекта / М. В. Грязев, О. А. Кузнецова // Изв. ТулГУ. Естественные науки, 2013. – Вып. 1. – С. 142 – 153.
28. Денисенко, В. ПИД –регуляторы: принципы построения и модификации. Ч.1. //Современные технологии автоматизации. –2006. -№ 4. –с. 66-74.
29. Денисенко, В. ПИД – регуляторы: принципы построения и модификации. Ч. 2.//Современные технологии автоматизации. – 2007 . - № 1. – с. 78 - 88.
30. Денисенко, В. ПИД – регуляторы: вопросы реализации. Ч. 1.//Современные технологии автоматизации. – 2007. - № 4. – с. 86 - 97.
31. Денисенко, В. ПИД – регуляторы: вопросы реализации. Ч. 2.//Современные технологии автоматизации. – 2008. - № 1. – с. 86 - 97.
32. Increasing Customer Value of Industrial Control Performance Monitoring- Honeywell’s Experience/ Lane Desborough1 and Randy Miller, Honeywell Hi-Spec
Solutions -Thousand Oaks, CA 91320.
33. Штейнберг, Ш. Е. Проблемы создания и эксплуатации эффективных систем регулирования/ Ш. Е. Штейнберг и др. // АСУ для промышленных предприятий. – 2007. - № 7 – С. 1 - 5.
34. Писарев, А. В. Сравнительные исследования расчётных методов определения параметров настроек промышленных ПИД – регуляторов/ А. В. Писарев, С. И. Новиков //Энергетика и теплотехника. Сборник научных трудов. Вып. 11. - НГТУ, 2007. - с. 191 – 200.
35. Wen. Tan. Comparison of some well - known PID tuning formulas/ Wen. Tan. Jizhen Liu, Tongwen Chen, Horacio. J. Marquez // Computers and Chemical Engineering. - 2006. - № 30. – p. 1416 - 1423.
36. Давыдов, Н. И. Определение параметров настройки ПИД – регулятора по переходной характеристике объекта управления/ Н. И. Давыдов, О. М. Идз он, О. В. Симонова // Теплоэнергетика. - 1995. - № 10. - с. 17 - 22.
37. Astrom K. J. Revisiting the Ziegler - Nichols step response method for PID control/ K. J. Astrom, T. Hagglund // Journal of Process Control - 2004. - № 4 - p.635 - 650. 38. Смирнов, Н. И. О корректности настройки ПИ Д - регулятора при аппроксимации переходной характеристики объекта регулирования апериодическим звеном с транспортным запаздыванием./ Н. И. Смирнов, В. Р. Сабанин, А. И. Репин // Промышленные АСУ и контроллеры – 2007. - № 1 – С. 35 - 39.
Дата добавления: 2021-05-28; просмотров: 1519;
Поиск по сайту
Узнать еще
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- IV. РАСЧЕТ РЕКТИФИКАЦИОННЫХ КОЛОНН
- V. ПРИМЕР РАСЧЕТА ФИЛЬТРА ВЫСОКИХ ЧАСТОТ ЧЕБЫШЕВА
- А) Расчет электрической цепи методом свертывания
- а) система Y-коэффициентов
- А. Расчет на устойчивость
- АВТОМАТИЗАЦИЯ МЕЖБАНКОВСКИХ РАСЧЕТОВ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
