Синтез регуляторов для технологических объектов с большим запаздыванием
Для многих технологических процессов: в нефтехимической, металлургической, горной, транспортной и других отраслях промышленности, характерным признаком является существенное время запаздывания (до нескольких десятков минут) реакции объекта (изменения выходной величины y) на изменение управляющего воздействия u. При определенной величине отношения времени запаздывания объекта  к его постоянной времени Т, в частности при
к его постоянной времени Т, в частности при  , эффективность традиционных закон управления (П, ПИ, ПД и ПИД) резко снижается из-за большой статической (П, ПД-законы) или динамической (И, ПИ, ПИД-законы) ошибки, а в некоторых случаях система может потерять устойчивость. В этой связи разработаны специальные (неклассические) законы управления [36-38]:
, эффективность традиционных закон управления (П, ПИ, ПД и ПИД) резко снижается из-за большой статической (П, ПД-законы) или динамической (И, ПИ, ПИД-законы) ошибки, а в некоторых случаях система может потерять устойчивость. В этой связи разработаны специальные (неклассические) законы управления [36-38]:
· пропорционально-интегрально-разностный (ПИР-закон);
· пропорционально-интегральный по предыстории (ПИП-закон).
В отличии от классических законов управления, использующих только информацию об отклонениях управляемой величины y от заданного значения 
 , для систем управления технологическими объектами с большим запаздыванием используется также априорные сведения.
, для систем управления технологическими объектами с большим запаздыванием используется также априорные сведения.
Рассмотрим особенности синтеза и настройки ПИР-регулятора, который устанавливается параллельно исследуемому объекту (рис. 46).
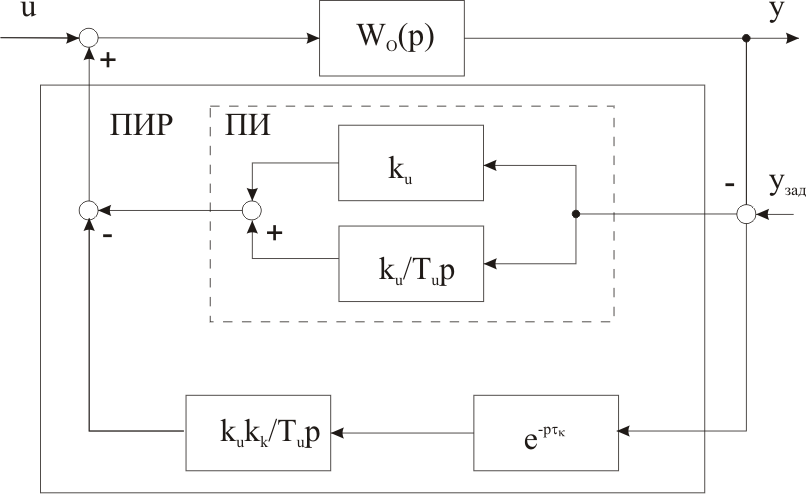
Рисунок 46 – Структурная схема АСУ с ПИР - регулятором
В качестве базового элемента принимается ПИ-регулятор с передаточной функцией:
 . (28)
. (28)
Для сокращения времени переходного процесса  и снижения колебательности скорость нарастания интегральной составляющей управляющего воздействия u должна уменьшаться с течением времени. Этим требованиям отвечает корректирующее звено с передаточной функцией
и снижения колебательности скорость нарастания интегральной составляющей управляющего воздействия u должна уменьшаться с течением времени. Этим требованиям отвечает корректирующее звено с передаточной функцией
 . (29)
. (29)
Для расчета параметров классического ПИ-регулятора (28) воспользуемся зависимостями, представленными в таблицах 3 и 4 для статических и астатических объектов управления. Дальнейшее улучшение качества переходного процесса производится путем введения корректирующего звена (29), параметры которого определим путем постановки вычислительного эксперимента.
Структурная схема исследуемой АСР давления реализованная в среде Simulink Matlab показана на рис. 47.
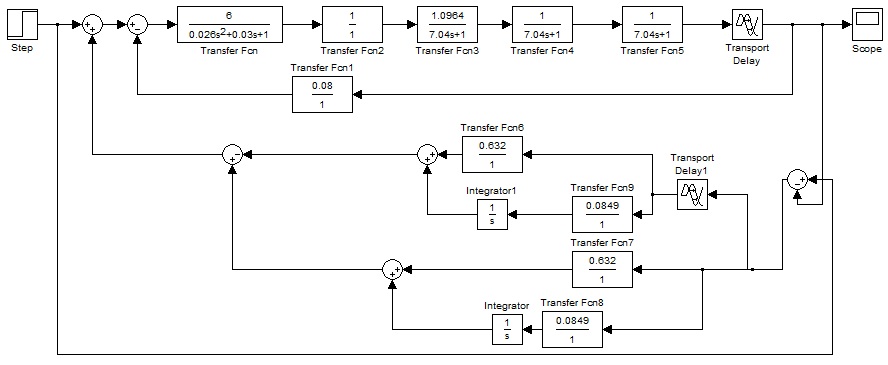
Рисунок 47 – АСР давления с ПИР –регулятором
В процессе моделирования использованы настройки ПИ-регулятора (табл. 5:  ) соответствующие худшим значениям показателей качества (табл. 6). В результате численного эксперимента установлено, что корректирующее звено с коэффициентом усиления
) соответствующие худшим значениям показателей качества (табл. 6). В результате численного эксперимента установлено, что корректирующее звено с коэффициентом усиления  в ПИР регуляторе позволит получить не только апериодический переходный процесс, но и на 30% улучшить быстродействие системы.
в ПИР регуляторе позволит получить не только апериодический переходный процесс, но и на 30% улучшить быстродействие системы.
В случае применения ПИП-регулятора, который располагается последовательно с объектом управления (рис. 48) передаточная функция базового элемента, ПИ-регулятора, вычисляется аналогично как было сделано выше (29), а корректирующее звено рассчитывается по формуле:
 ,
,
где  - параметры настрой корректирующего звена.
- параметры настрой корректирующего звена.
Анализ структурной схемы (рис. 48) показывает, что управляющее воздействие u формируется как алгебраическая сумма двух составляющих: uб – базовая составляющая на выходе ПИ-регулятора; uk – составляющая звеньев параллельной коррекции. Введение составляющей uk ослабляет пропорциональную и интегральную части базовой составляющей (k1 и k2 меньше единицы) при  . Последнее обеспечивается введением модели исследуемого объекта управление на рис. 51. Таким образом, ПИП-регулятор обеспечивает высокий уровень управляющего воздействия
. Последнее обеспечивается введением модели исследуемого объекта управление на рис. 51. Таким образом, ПИП-регулятор обеспечивает высокий уровень управляющего воздействия  при
при  и плавное снижение уровня при (
и плавное снижение уровня при (  ). В результате улучшается качество переходного процесса и увеличивается запас устойчивости по амплитуде и по фазе по сравнению с классическим ПИ-регулятором. Настройка параметров корректирующего звена k1 и k2 осуществляется путем вычислительного эксперимента.
). В результате улучшается качество переходного процесса и увеличивается запас устойчивости по амплитуде и по фазе по сравнению с классическим ПИ-регулятором. Настройка параметров корректирующего звена k1 и k2 осуществляется путем вычислительного эксперимента.
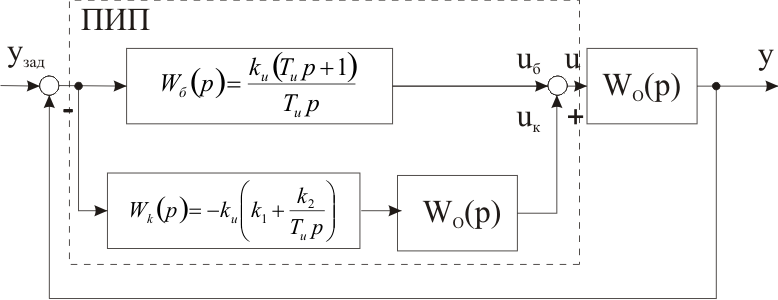
Рисунок 48 – Структурная схема АСУ с ПИП регулятором
Дата добавления: 2021-05-28; просмотров: 891;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II этап. Установка свойств объектов
- III. Здания для проживания людей
- III. Тесты для самоконтроля студентов
- III. ТРЕБОВАНИЯ РКФ ДЛЯ ДОПУСКА СОБАК В ПЛЕМЕННОЕ РАЗВЕДЕНИЕ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
