Расчет статических характеристик СПР
Статические электромеханические характеристики электропривода (рис. 5.13) с однократно-интегрирующей системой регулирования (П-регулятором скорости) строятся по уравнению:
 , (5.35)
, (5.35)
где  – угловая скорость холостого хода двигателя в СПР;
– угловая скорость холостого хода двигателя в СПР;  – падение угловой скорости двигателя в СПР при изменении нагрузки от нуля до номинальной; Δωр – статическое падение угловой скорости в разомкнутой системе; Kкω= 1/Kω – коэффициент передачи контура скорости.
– падение угловой скорости двигателя в СПР при изменении нагрузки от нуля до номинальной; Δωр – статическое падение угловой скорости в разомкнутой системе; Kкω= 1/Kω – коэффициент передачи контура скорости.
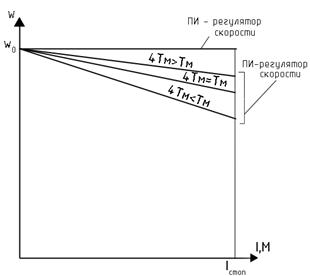
Рис. 5.13. Статические электромеханические характеристики электропривода с однократно и двухкратноинтегрирующей системой регулирования
При Тм < 4Тμ статический перепад угловой скорости в СПР будет больше, чем в разомкнутой системе Δωз > Δωр, при Тм = 4Тμ получим  ,
,
а при Тм > 4Тμ получим Δωз < Δωр.
Для двухкратноинтегрирующей СПР с ПИ-регулятором скорости электромеханические характеристики (рис. 5.13) представляют собой линии, параллельные оси абцисс, уравнение которых имеет вид:
 . (5.36)
. (5.36)
При перегрузке (стопорении) резкое уменьшение угловой скорости двигателя переводит работу регулятора скорости в зону ограничения и электропривод тормозится при постоянном стопорном моменте Мстоп = Iстоп/Kд, где Iстоп= Kк.тUзтмах. Электромеханические характеристики СПР в зоне ограничения Iстоп = Iотс представляют собой прямые параллельные оси ординат.
Электромеханические характеристики на рабочем участке (0 < Iя.ц < Iстоп) строятся для ωо мах и ωо мin.
Полная структурная схема системы ТП – Д с подчиненным регулированием переменных на примере двухкратноинтегрирующей приведена на рис. 5.14.

Рис. 5.14. Структурная схема двухкратноинтегрирующей системы
подчиненного регулирования
В СПР учтено влияние обратной связи по ЭДС двигателя и ограничение тока стопорным значением.
5.7. Моделирование и анализ переходных процессов
в замкнутой системе ТП – Д с подчиненным
регулированием переменных
Для получения переходных процессов в замкнутой системе ТП – Д
с подчиненным регулированием переменных по полученной структурной схеме (рис. 5.14) набираем модель в программе SIMULINK, Sim Power System (рис. 5.15, 5.16).
Настройку системы начинают с внутреннего контура – контура тока (рис. 5.2). Характер переходного процесса тока двигателя должен соответствовать расчетным параметрам (перерегулирование, время переходного процесса). Затем в контур тока вводят обратную отрицательную связь по ЭДС двигателя и анализируют степень влияния этой связи. При необходимости устраняют влияние обратной связи по ЭДС двигателя одним из рассмотренных способов в гл. 5 и определяют эффективность компенсации этого влияния по характеру переходного процесса тока двигателя.
Настройку контура скорости на модели осуществляют после подключения к контуру тока объекта регулирования, регулятора скорости, обратной связи по скорости и при отключенной обратной отрицательной связи по ЭДС двигателя.
Характер переходного процесса должен соответствовать расчетным параметрам настройки контура на модульный или симметричный оптимум. При настройке на симметричный оптимум при необходимости на входе контура скорости устанавливают фильтр и проверяют качество переходных процессов.
После настройки контура скорости на модели объекта регулирования подключают обратную связь по ЭДС двигателя. При необходимости осуществляют устранение влияния этой обратной связи. Затем настраивается отсеч-
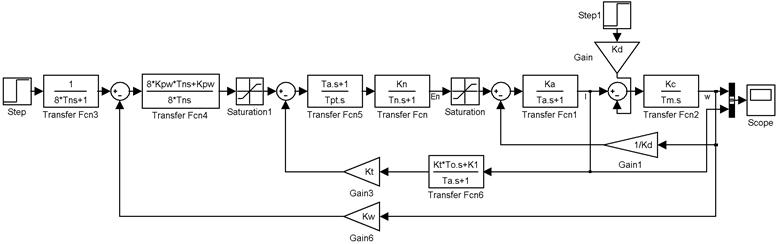
Рис. 5.15. Модель двухконтурной системы подчиненного регулирования в Simulink
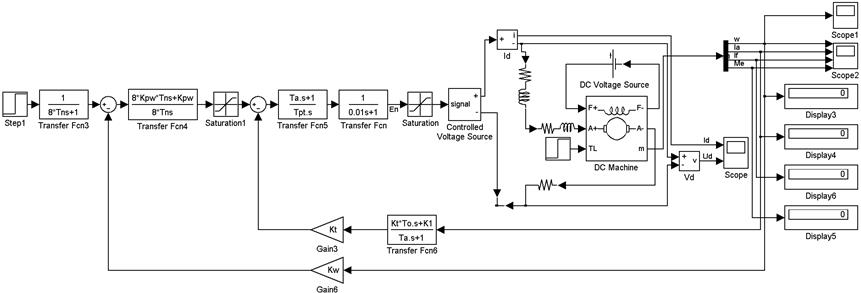
Рис. 5.16. Виртуальная модель двухконтурной скоростной системы подчиненного регулирования
ка, которая осуществляется на модели в результате ограничения выходного сигнала регулятора скорости с помощью нелинейного звена «насыщение» из библиотеки SIMULINK. На полностью набранной модели проводят анализ работоспособности СПР в режимах пуска и реверса с нагрузкой и без нагрузки, а также в режиме наброса нагрузки. Определяют работоспособность СПР при варьировании параметров двигателя (Тя и Тм) при их увеличении
и уменьшении в два раза.
Все полученные графики необходимо проанализировать по показателям качества регулирования, сделать соответствующие надписи и подписи к ним, а также выводы о работоспособности спроектированной системы в различных режимах работы.
Дата добавления: 2016-12-27; просмотров: 2504;
Поиск по сайту
Узнать еще
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- B Убедитесь что звезды распредвалов должным образом точно выставлены до установки и затяжки болтов
- CIH — газораспределительный механизм с распределительным валом в головке блока цилиндров
- Cравнительная характеристика усилителей на БТ
- F-распределение Фишера

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
