Системы подчиненного регулирования тока якоря и угловой скорости ДПТ НВ
В рассмотренных выше схемах (см. рис. 3.3, рис. 3.6, рис. 3.17) замкнутых систем ЭП для обеспечения требуемых характеристик используется отрицательная обратная связь по скорости двигателя. Токовая отсечка организуется с помощью дополнительного узла. Причем сигналы с датчика скорости и датчика тока якоря поступают на один усилитель (регулятор). Такой принцип построения системы, как правило, не позволяет получить максимально достижимого быстродействия системы. Кроме того, схема регулятора оказывается в большинстве случаев достаточно сложной (не типовой), что вызывает дополнительные проблемы при наладке системы.
Современные АЭП выполняются в виде систем подчиненного регулирования (СПР) координат. Функциональная схема однозонной системы подчиненного регулирования тока якоря и угловой скорости ДПТ НВ приведена на рис. 3.31. В системе обеспечивается регулирование угловой скорости двигателя за счет изменения напряжения Uя на якоре. Это напряжение регулируется с помощью управляемого выпрямителя, содержащего СИФУ и блок вентилей (БВ).
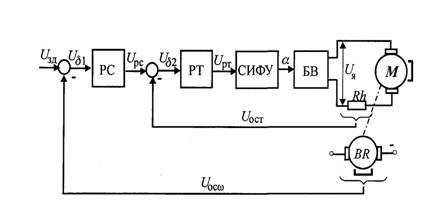
Рис. 3.31
Система содержит два замкнутых контура: внутренний токовый и внешний скоростной. Внутренний контур включает СИФУ, БВ, датчик тока якоря (шунт Rh) и регулятор тока РТ. Внешний контур охватывает элементы внутреннего и дополнительно содержит якорь двигателя М, датчик скорости (тахогенератор BR) и регулятор скорости.
Поясним работу схемы. Начнем с внутреннего контура. Он выполнен в виде замкнутой системы с отрицательной обратной связью по току якоря. Входным (задающим) сигналом для этого контура является выходное напряжение Uрс регулятора скорости. На входе РТ осуществляется сравнение (вычитание) сигналов Uрт и сигнала Uост обратной связи по току якоря. Сигнал ошибки на входе РТ
Ud2 = Uрт – Uост.
При постоянном значении Uрс внутренний контур работает в режиме стабилизации тока якоря. Если, например, ток якоря начинает снижаться, то сигнал Uост также уменьшается, а сигнал ошибки Ud2 увеличивается. При этом увеличивается напряжение на выходе РТ, и, как следствие, возрастает напряжение на якоре двигателя – ток якоря начинает возрастать, стремясь к заданному значению.
Дата добавления: 2016-12-27; просмотров: 1966;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I. Способы представления переменного синусоидального тока и напряжения.
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
