Рассмотрим работу внешнего, скоростного контура. Сигнал на входе РС определяется соотношением
Ud1 = Uзд – Uocw.
Если  д по каким-либо причинам снижается, то напряжение Uocw тахогенератора также уменьшается, а сигнал ошибки Ud1 увеличивается. Это приводит к возрастанию напряжения Uрс на выходе РС, т.е. на вход токового контура начинает поступать большой сигнал задания. За счет работы внутреннего контура ток якоря увеличивается и д растет, стремясь к заданному значению.
д по каким-либо причинам снижается, то напряжение Uocw тахогенератора также уменьшается, а сигнал ошибки Ud1 увеличивается. Это приводит к возрастанию напряжения Uрс на выходе РС, т.е. на вход токового контура начинает поступать большой сигнал задания. За счет работы внутреннего контура ток якоря увеличивается и д растет, стремясь к заданному значению.
Из приведенных рассуждений несложно сделать вывод, что в этой схеме задача регулирования тока якоря подчинена задаче регулирования д. Отсюда название систем – системы подчиненного регулирования.
Рассмотрим, как протекают процессы при управлении скоростью. Так, чтобы увеличить д, увеличивают напряжение задания Uзд. При этом Ud1 и Uрт увеличиваются, внутренний контур обеспечивает возрастание тока якоря и двигатель разгоняется до заданного значения скорости.
Упрощенная принципиальная схема СПР тока якоря и угловой скорости ДПТ НВ для нереверсивного ЭП приведена на рис. 3.32.
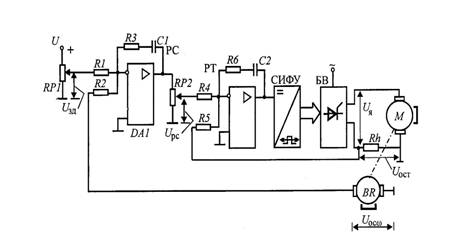
Рис. 3.32
Регулятор тока в схеме выполнен на операционном усилителе DA2 в виде ПИ-регулятора. Использование ПИ-регулятора позволяет получить максимальное быстродействие токового контура. На вход РТ через резисторы R4 и R5 поступает сигнал с выхода РС – Uрс и с выхода датчика тока (шунт Rh) – Uост.
Регулятор скорости выполнен на операционном усилителе DA1 в виде ПИ-регулятора. Использование ПИ-регулятора в скоростном контуре придает астатизм системе (см. п. 3.2). В астатической системе при использовании идеального регулятора статическая ошибка в поддержании скорости сводится к нулю. На вход РС через R1 поступает сигнал Uзд от задатчика скорости (потенциометр RP1) и через R2 – сигнал отрицательной обратной связи Uocw по скорости, снимаемый с тахогенератора. Для настройки значения тока отсечки в схеме предусмотрен потенциометр RP2. Максимальное значение напряжения на выходе РС определяется насыщением усилителя. На вход РТ подается часть выходного напряжения РС, снимаемого с делителя RP2. Перемещая движок RP2, например, вниз, можно уменьшать максимальное значение сигнала Uрс. Этот сигнал является задающим для внутреннего токового контура. А его максимальное значение определяет максимальный ток якоря – ток отсечки.
Дата добавления: 2016-12-27; просмотров: 1644;
Поиск по сайту
Узнать еще
- IV. Сигналы ограждения на железнодорожном транспорте
- IX. Звуковые сигналы на железнодорожном транспорте
- LI. СВЯЗЬ И СИГНАЛИЗАЦИЯ
- V. Ручные сигналы на железнодорожном транспорте
- VI. Сигнальные указатели и знаки на железнодорожном транспорте
- VII. Сигналы, применяемые при маневровой работе
- VIII. Сигналы, применяемые для обозначения поездов, локомотивов и другого железнодорожного подвижного состава
- XXXVII. СИГНАЛИЗАЦИЯ И СВЯЗЬ НА ШАХТНОМ ТРАНСПОРТЕ И ПОДЪЕМЕ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
