Передаточную функцию (3.13) можно записать и в другом виде. Разделив почленно числитель на знаменатель, получим
 ,
,
где K=T/Tи – коэффициент усиления пропорциональной части регулятора.
Как следует из последнего выражения, передаточную функцию можно представить в виде суммы пропорциональной части (П) и интегральной (И) части. Отсюда название регулятора. Реакция ПИ-регулятора на скачкообразное изменение сигнала (Uзд – Uoc) приведена на рис. 3.14. Сравнивая рис. 3.12 и рис. 3.14, можно отметить, что
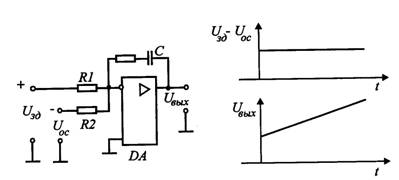
Рис. 3.13 Рис. 3.14
ПИ-регулятор в первый момент времени более «энергично» воздействует на управляемый преобразователь и, соответственно, двигатель. Благодаря этому, в принципе, быстродействие системы может быть улучшено.
Схема пропорционально-интегрально-дифференциального регулятора (ПИД-регулятора) приведена на рис. 3.15. По сравнению с предыдущей схемой здесь добавлены емкости С2 и С3, включенные параллельно резисторам R1, R2. Иногда емкость включают только параллельно R2. Тогда для сигнала обратной связи схема имеет свойства ПИД- регулятора, а для сигнала задания – свойства ПИ- регулятора.
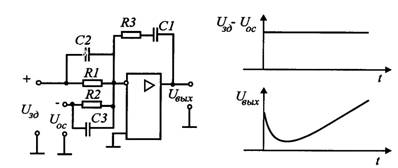
Рис. 3.15 Рис. 3.16
Дата добавления: 2016-12-27; просмотров: 1747;
Поиск по сайту
Узнать еще
- IX. Противоречие возможности и действительности
- R підвищення конкурентоспроможності й акціонерної вартості.
- V. ЛОГИЧЕСКИЕ ОСНОВЫ ВЫЧИСЛИТЕЛЬНОЙТЕХНИКИ
- А) Подъем газа в закрытой скважине при невозможности ее вымыва.
- Альтернативные возможности производства масла и пушек
- Аналитические возможности, задачи и основные направления анализа СНС
- Арифметические операции в системах счисления используемых вычислительной техникой.
- Архивация файлов, назначение, виды и основные возможности архиваторов.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
