Регулирование угловой скорости в системе генератор-двигатель (Г-Д)с обратной связью по скорости и токовой отсечкой
Упрощенная схема системы Г-Д приведена на рис. 3.17. Она содержит: двигатель постоянного тока независимого возбуждения М; генератор постоянного тока G, от которого получает питание якорь двигателя; усилитель мощности УМ, к выходу которого подключена обмотка возбуждение OBG генератора; регулятор, выполненный на операционном усилителя DА; задатчик частоты вращения RP; тахогенератор BR; датчик тока якоря – шунт Rh; стабилитроны VD1, VD2.
Генератор G приводится в движение приводным (гонным) двигателем (на схеме не показан). На промышленных предприятиях, где имеется сеть переменного тока, в качестве гонного двигателя используется асинхронный короткозамкнутый двигатель. В автономных установках, например на удаленных буровых установках, судах речного, морского флота, железнодорожного транспорта и тому подобное, в качестве приводного двигателя может служить двигатель внутреннего сгорания, паровая или газовая турбина и т.п.
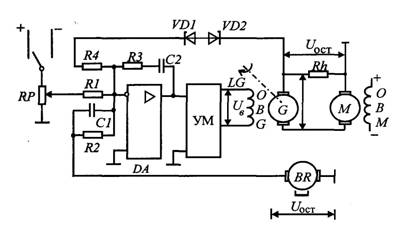
Рис. 3.17
Регулирование угловой скорости двигателя в схеме осуществляется путем изменения напряжения UЯ на якоре двигателя M, которое происходит за счет регулирования напряжения UВ на обмотке возбуждения генератора. Для согласования между напряжением и мощностью на выходе регулятора с потребной мощностью и напряжением питания обмотки OBG служит усилитель мощности, например транзисторный усилитель.
Стабилизация скорости двигателя достигается за счет отрицательной обратной связи по скорости. Так, если под действием возмущений ωд начинает снижаться, то уменьшается сигнал обратной связи по скорости Uocω, а сигнал ошибки, равный
Ud = Uзд – Uocω,
увеличивается. При этом повышается напряжение на выходе регулятора, на выходе УМ и на якоре двигателя. В результате ωд стремится к заданному значению. Точность стабилизации ωд, как показано выше, определяется коэффициентом усиления разомкнутой системы. При использовании регулятора, содержащего интегральную составляющую (например ПИД-регулятора, как на рис. 3.17), удается получить достаточно высокую точность стабилизации (см. первый участок характеристики на рис. 3.18).
Для ограничения тока якоря служит узел токовой отсечки. Один из возможных вариантов его реализации (см. рис. 3.17) включает шунт Rh и стабилитроны VD1, VD2. Этот узел работает так же, как описано в п. 3.1. Пока ток якоря Iя меньше тока отсечки Iотс, стабилитроны имеют большое сопротивление и не оказывают влияние на работу схемы. Если ток Iя превышает Iотс, то сопротивление стабилитрона резко снижается и на выход регулятора через резистор R4 начинает поступать дополнительный сигнал (Uост – UZ). При этом сигнал ошибки
Ud = Uзд – Uocω – (Uост – UZ). (3.16)
По мере увеличения тока якоря Iя растет напряжение Uост. Как следствие, снижается Ud, Uв, Uя, ωд. В результате достигается ограничение тока якоря (второй участок характеристик на рис. 3.18).
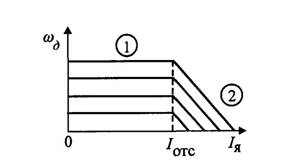
Рис. 3.18
К достоинствам схемы можно отнести простоту реверса двигателя и реализации рекуперативного торможения. Реверс осуществляется за счет изменения полярности напряжения на задатчике RP, что в конечном счете ведет к изменению полярности напряжения на якоре двигателя.
Генераторное торможение с отдачей энергии в сеть возможно, если в качестве гонного двигателя генератора используется электродвигатель, например асинхронный. Поясним это. Предположим, что машина работает на характеристике 1 (рис. 3.19) в т.а. Чтобы снизить скорость, напряжение на датчике RP снижают, и после переходного процесса машина должна перейти на характеристику 2 в т. в. Процесс перехода на новую характеристику протекает так. В первый момент времени wд, вследствие механической инерционности привода, остается неизменной (на рис. 3.19 процесс перехода условно показан стрелками). Напряжение генератора уменьшается и становится меньше противоЭДС двигателя. Ток в якорной цепи меняет знак. Машина M теперь работает генератором, а машина G – двигателем и заставляет гонный двигатель вращаться со скоростью выше скорости идеального холостого хода. Последний переходит в режим генератора и отдает электрическую энергию в сеть переменного тока. Если ток якоря превышает по модулю Iост, то в переходном процессе вступает в действие токовая отсечка и процесс перехода на новую характеристику от т. с до т. d идет при токе Iя = |Iотс|. Далее под действием момента сопротивления Мc механизма wд продолжает снижаться до нового установившегося режима в т. b.
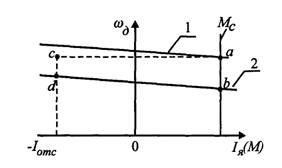
Рис. 3.19
Система Г-Д имеет очевидные недостатки. Прежде всего, это большая установленная мощность электрических машин: мощность генератора и гонного двигателя должны быть не меньше мощности двигателя. Т.е. общая установленная мощность электрических машин равна или превышает мощность двигателя в 3 раза. Кроме того, наличие дополнительных вращающихся машин приводит к снижению надежности, большим затратам на профилактику и ремонт. Значительная инерционность генератора затрудняет достижение высоких динамических характеристик системы.
В связи с этим в настоящее время система Г-Д используется в основном в автономных устройствах, а в промышленных установках, получающих питание от электрических сетей, такая система почти не применяется.
Дата добавления: 2016-12-27; просмотров: 2450;
Поиск по сайту
Узнать еще
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- I.9. Несовместимость матери и плода по системе АВ0
- II.5. Несовместимость матери и плода по системе Резус
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- RC-генератор с лестничной схемой обратной связи
- VII. Регулирование частоты вращения двигателя
- А - образец-пуансон с жесткой связью; б - термический цикл нагружения
- А НЕ О СИСТЕМЕ: КОРОТКАЯ ПОЗИЦИЯ ПО ФУНТУ СТЕРЛИНГОВ, НЕПРЕРЫВНЫЕ ФЬЮЧЕРСЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
