Напряжение на выходе усилителя
Uвых = UздKу – UосKу = (Uзд – Uос)Kу.
Последнему выражению соответствует алгоритмическая схема, представленная на рис. 3.9. Из нее следует, что рассматриваемая схема обеспечивает сравнение (вычитание) напряжений и усиление сигнала ошибки Uδ=Uзд – Uос. Приведенную схему (см. рис. 3.8) называют пропорциональным регулятором, или сокращенно П-регулятором.
Для уменьшения статистической ошибки, как отмечалось выше, необходимо вводить в систему интегрирующее звено. Схема интегрального регулятора (И-регулятора) приведена на рис. 3.2 (для простоты считаем здесь и далее R1=R2). На основании выражения (3.12) несложно получить передаточную функцию регулятора:
 ,
,
где Ти – постоянная времени интегрирующего преобразования.
Передаточная функция соответствует интегрирующему (астатическому) звену.
При скачкообразном изменении сигнала Ud напряжение Uвых линейно нарастает (см. рис. 3.11). Учитывая свойства И-регулятора «накапливать» входной сигнал, можно дать следующие пояснение особенностям работы астатической системы. Если в системе появляется сигнал ошибки, то напряжение на выходе регулятора начинает изменяться и, соответственно, изменяется воздействие на двигатель. Этот процесс продолжается до тех пор, пока сигнал ошибки не будет сведен к нулю, т.е. пока не будет достигнуто равенство
Uос = Uзд.
Выполнение же этого равенства означает, что регулируемая величина равна заданной, т.е. статистическая ошибка системы сведена к нулю. Отметим, что для сведения статистической ошибки к нулю нужен идеальный И-регулятор. В реальной схеме операция интегрирования выполняется с некоторой погрешностью, поэтому статистическая ошибка в замкнутой системе сводится хотя и не до нуля, но, как правило, до достаточно малых значений.
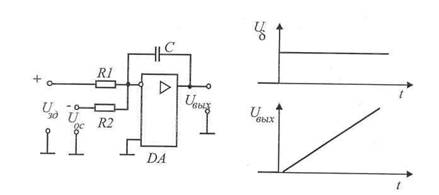
Рис. 3.10 Рис. 3.11
Алгоритмическая схема регулятора приведена на рис. 3.12. И-регулятор обеспечивает сравнение сигналов Uзд и Uос, а его выходное напряжение пропорционально интегралу от сигнала ошибки.
 .
.
Схема пропорционально-интегрального регулятора (ПИ-регулятора) приведена на рис. 3.13. В цепь обратной связи операциоионного усилителя последовательно включены резистор R3 и емкость С. На основании выражения (3.12) несложно найти передаточную функцию регулятора:
 , (3.13)
, (3.13)
где T = R3×C, Tи = R2×С – соответственно постоянные времени дифференцирующего и интегрирующего преобразований.
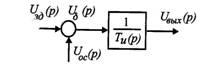
Рис. 3.12
Дата добавления: 2016-12-27; просмотров: 1944;
Поиск по сайту
Узнать еще
- А касательное напряжение (сила, действующая на единицу площади)
- Амплитудо-частотная и фазо - частотная характеристики усилителя .
- Анализ дифференциального усилителя.
- Анализ работы транзисторного усилителя. Понятие о классах усиления усилительных каскадов.
- Анализ работы усилителя с общим эмиттером
- АЦП – устройства, преобразующие аналоговый сигнал (напряжение) в соответствующий ему код (двоичный, десятичный и т.д.).
- АЭП с АКЗД с регулируемым напряжением, подводимым к статору АД.
- Баланс реактивной мощности и его связь с напряжением

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
