Системы позиционирования с пьезокерамическими преобразователями УЗК
В ряде технологических процессов (например, на операциях литографии) к точности систем позиционирования предъявляются повышенные требования, т.к. суммарная погрешность совмещения элементов в рабочей зоне не должно превышать 0,1 – 0,2 мкм. Кроме того, прецизионные системы позиционирования должны обладать высокой чувствительностью в сравнительно большом диапазоне перемещений до 10 см, обеспечивать возможность независимого управления по координатным осям Х, У и углу поворота φ, иметь высокую стабильность и достаточное быстродействие. Этим требованиям удовлетворяют системы позиционирования в горизонтальной плоскости, основанные на преобразовании УЗК в непрерывное или шаговое перемещение координатного стола. УЗ системы точного позиционирования по принципу работы делят на 2 группы:
1. системы, в которых используются косые удары с УЗ частотой.
2. системы, в которых используются упругие деформации типа бегущей волны.
5.1.1 Системы точного позиционирования с использованием косых ударов
Принцип работы такой системы поясняет рисунок 5.1. Координатный стол 1 крепится в узловых точках преобразователя 2. Преобразователь 2 выполняется в виде пьезокерамического стержня или пластины, аналогично выполнен преобразователь 3. Преобразователь 2 взаимодействует с преобразователем 3. Системы работает за счет контакта 2-х активных элементов.
При соединении двух пьезоэлементов, в которых возбужденны УЗК со сдвигом фаз на 900 в них точка А будет двигаться по прямой. При акустическом соединении элементов в точке А продольные волны проникают из одного элемента в другой. Смешиваясь, они становятся неразличимыми, поэтому точка А движется по прямой линии. Если в пьезоэлементах возбуждены продольные и изгибные колебания одной частоты, то при сдвиге фаз между ними отличном от нуля траекторией точки А является эллипс (фигуры Лиссажу).
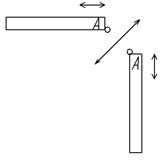
Рисунок 5.1 – Принцип косых ударов.
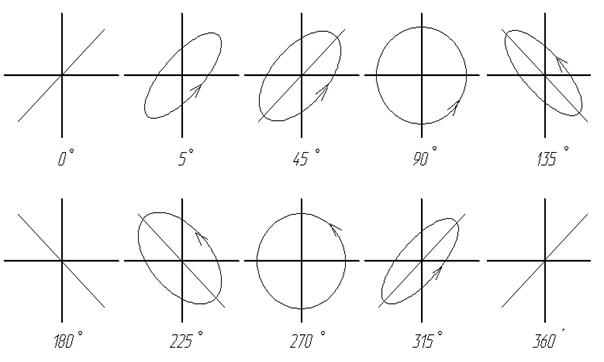
Рисунок 5.2 – Фигуры Лиссажу.
Косой удар между преобразователями 2 и 3 имеет место при сдвиге фаз колебаний на угол от 0 до π радиан. Изменяя сдвиг фаз колебаний можно изменять скорость и направление движения преобразователя 2, вместе с координатным столом 1. Все три преобразователя через специальное фазовращающее устройство подключены к УЗ генератору или нескольким засинхронизированным между собой генераторам. Необходимым условием работы такой системы является равенство резонансных частот всех 3-х УЗ Преобразователей. При эксплуатации подобных систем используются частоты от 20 кГц до нескольких МГц. Амплитуда колебаний может изменяться от 0,1 до 10 мкм. а скорость позиционирования от 10-6 до 0,1 м/с. Меньшие скорости стола имеют место при работе системы в шаговых режимах, задаваемых с помощью амплитудно-фазовой или частотной модуляции. Зависимости КПД системы перемещения η от частоты колебаний имеет остро выраженный максимум на частоте f1, слева и справа от f2 значение η резко падает. Аналогичный характер, но менее острый, имеет зависимость средней скорости перемещения от частоты. Коэффициент неравномерности скорости перемещения падает с увеличением частоты.
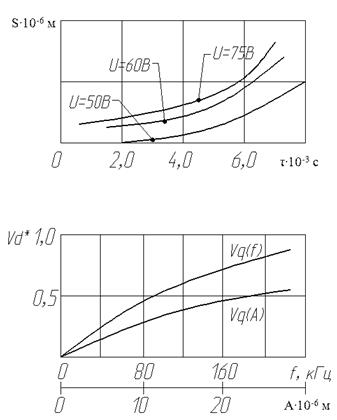
Рисунок 5.3 - Экспериментальные характеристики шаговых и скоростных режимов позиционирования с преобразователем УЗК.
На рисунке 5.4 показана 3-х координатная система позиционирования с пьезокерамическими преобразователями УЗК. Система состоит из нижней (базовой) 1 и верхней 2 кареток, перемещающихся по осям Х и У, и поворотного стола 3, вращающегося вокруг вертикальной оси. Поворотный стол 3 смонтирован на верхней каретке 2, а последняя - на базовой каретке 1. Перемещение кареток по осям осуществляется с помощью блоков преобразователей 5, 6, а по угловой координате φ - с помощью преобразователя 7. Блоки 5, 6 контактируют с каретками в точках пересечения осей преобразователей, которые установлены под углом 900 друг к другу. Преобразователи поджимаются к кареткам и поворотному столу пружинами 4. Конструктивно иногда вместо пружин удобнее использовать электромагниты. Диапазон перемещения кареток по осям Х и У равен ±5 см, а по координате φ неограничен. Чувствительность двигателя по Х, У достигает 0,08 мкм, а по углу φ – 2∙10-7 рад. Взаимное влияние координат при перемещении составляет менее 10%.
Дата добавления: 2016-12-16; просмотров: 1830;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I. Автоматическая частотная разгрузка.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. АВТОМАТИЧЕСКАЯ РАЗГРУЗКА ПО ЧАСТОТЕ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
