Волновые системы позиционирования
В системах этого типа используется тангенциальная составляющая скорости поверхностных точек упругих тел, при генерировании в них упругих деформаций. В конструктивном отношении это несложные устройства. В них используются либо несколько преобразователей с постоянно смещенной фазой колебаний, либо несколько преобразователей с периодически изменяющейся фазой – бегущей волной.
В системе с продольной бегущей волной деформаций на элементарный участок перемещаемого объекта Δl действует сила:
 , (5.2)
, (5.2)
где m – масса перемещаемого объекта,
β – коэффициент трения скольжения,
μ – коэффициент сопротивления материала,
l – длина перемещаемого объекта (кратна длине волны λ)
Коэффициент полезного действия системы - η = 0,05 – 0,2.
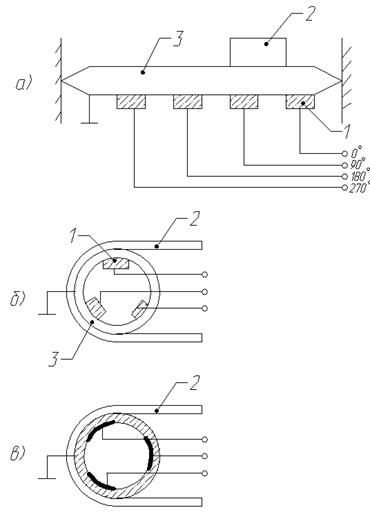
Рисунок 5.5 Волновые системы позиционирования с постоянно смещенной фазой:
а) поступательного движения
б) вращательного движения с дискретным преобразованием
в) вращательного движения с разделенными накладками
1. преобразователи
2. объект перемещения
3. волновод.
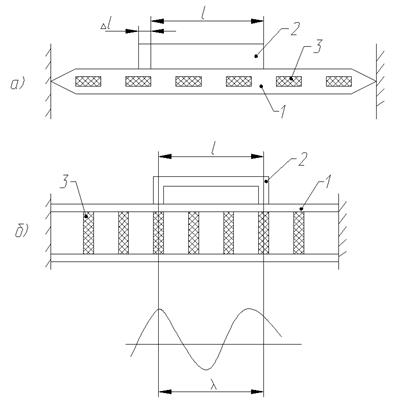
Рисунок 5.6 - Схема волновых систем перемещения с продольными (а) и поперечными (б) упругими деформациями преобразователей.
1 - волновод, 2 – перемещаемый объект, 3 – преобразователи.
Системы могут быть выполнены конструктивно с продольными и поперечными колебаниями преобразователей 3.
Системы позиционирования с преобразователями УЗК особенно эффективны в шаговых режимах движения, т.к. широкий диапазон регулирования позволяет достичь высокой чувствительности системы (до 0,02 мкм). Экспериментальные зависимости отработанных шагов S’ от длительности τ шагозадающих импульсов показывают, что S’ нелинейно растет с увеличением τ и рабочего напряжения. Относительные скорости Vd* = Vq/Vqm (где Vq – измеряемое и Vqm – максимальное значения скорости) перемещения объекта увеличиваются с ростом частоты и амплитуды поперечных деформаций. Причем более резко от частоты.
Достоинства систем микроперемещений на базе ПП:
- высокие удельные мощности;
- высокий КПД;
- отсутствие излучаемых электромагнитных полей;
- отсутствие моточных изделий;
- относительная простота конструкции;
- высокая технологичность, невысокая стоимость;
- высокие динамические характеристики в переходных режимах движения. При отключении питания преобразователь превращается в тормозящий элемент. Это свойство позволяет реализовывать непрерывное и заторможенное движения (шаговые). Для этого преобразователь запитывается специальными импульсами регулируемой частоты и скважности.
Недостатки:
- малые интегральные мощности и усилия (от долей Вт до единиц Вт);
- высокая вероятность хрупкого разрушения ПКП;
- образование выли керамики при ударных нагрузках;
- общий недостаток резонансных преобразователей микроперемещений: диапазон регулирования скорости у них ограничен частотами, находящимися в узкой области частот электромеханического резонанса рабочего пьезоэлемента.
Дата добавления: 2016-12-16; просмотров: 1507;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
