Системы позиционирования с линейными электродвигателями
Под линейным двигателем понимается электрическая машина, обеспечивающая поступательное движение. Наиболее просто можно представить себе линейный двигатель, если мысленно разрезать по образующей цилиндра обычный индукционный двигатель и развернуть его в плоскость. На рисунке 5.7а условно изображена конструкция асинхронного двигателя, ротор которого представлен в виде полого медного цилиндра. Если из статора вырезать и оставить в конструкции часть, соответствующую некоторому центральном углу α, то получится так называемый дугостаторный или сегментный двигатель, рисунок 5.7б, который по характеру электромагнитных процессов может рассматриваться как модификация линейного двигателя. Важной особенностью дугостаторного двигателя является зависимость частоты вращения ротора не только от полюсного деления и частоты тока в обмотке статора, но и от угла α. При заданном числе пар полюсов р и частоте сети f, частота вращения будет тем ниже, чем меньше угол α
 , (5.2)
, (5.2)
где n0 – частота вращения неразрезанного цилиндрического двигателя.
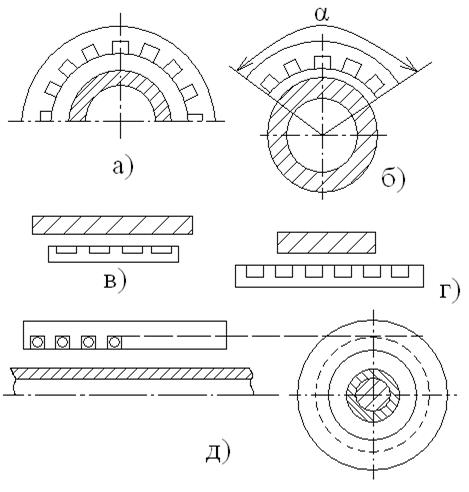
Рисунок 5.7 – Конструктивные схемы асинхронных роторных и линейных двигателей.
а) роторный асинхронный двигатель нормального положения,
б) роторный дугостаторный асинхронный двигатель,
в) линейный асинхронный двигатель с коротким индуктором,
г) линейный асинхронный двигатель с коротким вторичным элементом,
д) цилиндрический линейный асинхронный двигатель.
Если дугостаторный двигатель выполняется с бесконечно большим радиусом, то получают линейный двигатель – второй конструктивный тип двигателей с разомкнутым магнитопроводом. При этом ротор вырождается в плоский вторичный элемент, а статор в первичный элемент.
Линейный электродвигатель – электродвигатель у которого один из элементов магнитной цепи разомкнут и имеет развернутую обмотку создающую общее магнитное поле. Другой элемент магнитной цепи выполнен в виде направляющей, которая обеспечивает линейное перемещение подвижной части двигателя. Отличительной чертой линейного двигателя является наличие магнитодвижущей силы перпендикулярной направлению движения. Эту силу называют нормальной силой. Во вращающихся электрических двигателях такая сила не возникает. После разрезания и развертки в плоскость индукторного (асинхронного) двигателя длины первичной и вторичной частей будут практически одинаковыми. По мере движения их относительно друг друга будет сокращаться активная зона машины и ухудшаться ее характеристики. Чтобы избежать этого поступают двояким образом: либо первичную часть – индуктор (бывший статор) выполняют коротким, в вторичную часть – бегун (бывший ротор) – длинным (рисунок 5.7в), либо индуктор выполняют длинным, а вторичную часть – короткой (рисунок 5.7г). Топологической разновидностью линейного асинхронного двигателя является цилиндрический (трубчатый) асинхронный двигатель (рисунок 5.7д). В этом двигателе цилиндрические катушки обмотки размещаются в индукторе и соединяются друг с другом таким образом чтобы вдоль оси цилиндра возникло бегущее поле: вторичный элемент имеет вид штока, совершающего поступательное движение. Принципиально возможны четыре системы линейных двигателей: электромагнитная, магнитоэлектрическая, электродинамическая и индукционная.
Электромагнитные линейные электрические машины применяются в различных вибрационных и ударных механизмах (например, так называемые, соленоидальные молотки).
Электродинамические линейные двигатели имеют своим вращательным аналогом электрический двигатель постоянного тока. Трудности коммутации и крепления обмотки на движущемся элементе сдерживают применение этих двигателей.
Принцип действия индукционных машин основан на явлении бегущего магнитного поля.
Электромагнитные, электродинамические и индукционные машины имеют довольно сложную конструкцию, большую массу подвижной системы и значительную инерционность. Они используются в основном в приводах мощных электромеханических устройств. В системах точного позиционирования технологического оборудования широко применяется линейный привод магнитоэлектрического типа. Такой привод создает минимальные возмущающие усилия в направлениях несовпадающих с осью перемещений. Прообразом такого двигателя являются динамические громкоговорители. Наиболее простыми в конструктивном исполнении являются цилиндрические линейные двигатели магнитоэлектрического типа. Схема такого двигателя приведена на рисунке 5.8. Между центральным
Рисунок 5.8 Схема цилиндрического магнитоэлектрического двигателя.
1 – магнитопровод, 2 – магнит, 3 – каркас, 4 – обмотка, 5 – (фланец) полюс, 6 – фланец, 7 – центральный стержень(полюс), 8 – исполнительный механизм.
стержнем 7 (керном) и фланцем (полюсом) 5 кольцевого магнита 2 создается сильное магнитное поле. В этом зазоре находится катушка 4 намотанная на каркасе 3. каркас 3 скреплен с фланцем 6 и исполнительным механизмом 8. с помощью фланца 6 и направляющих исполнительного механизма катушки центрируются в зазоре. Катушка помещается точно в середине магнитного зазора. При перемещении она не должна задевать за края полюсов. При пропускании электрического тока катушки втягиваются или вытягиваются из магнитного зазора. Основным недостатком двигателей такой конструкции является то, что при увеличении хода исполнительного звена приходится изменять магнитопроводы. Конструкция становится тяжелой и громоздкой. Такие двигатели эффективны для ограниченных перемещений порядка нескольких сотен микрометров.
Для координатных столов применяются плоские линейные двигатели магнитоэлектрической системы, с замкнутым магнитопроводом (Рис.5.9). Плоский
Рисунок 5.9 - Схема плоского линейного магнитоэлектрического двигателя.
1 – фланец, 2 – обмотка, 3 – каркас, 4 – магнит, 5 – магнитопровод.
линейный двигатель магнитоэлектрического типа состоит из жесткого металлического или пластмассового каркаса, закрепленного с помощью фланца на каретке координатного стола. На каркас уложена и залита эпоксидной смолой обмотка таким образом, что одна часть каждого витка пересекает окно каркаса образует тонкое проволочное полотно. Это полотно вводится в зазор между постоянным магнитом и замкнутым магнитопроводом из ферромагнитного материала. При пропускании по обмотке электрического тока возникает тяговое усилие, которое передается каретке. Величина тягового усилия может быть определена из выражения
 , (5.3)
, (5.3)
где  – величина потокосцепления,
– величина потокосцепления,  ;
;
I – величина поля в катушке, в А;
l – длина магнитного зазора, в м;
В – индукция в воздушном зазоре магнитопровода, в Тл.
Двигатель считается линейным по отношению к направлению перемещения, но ни в коем случае не в отношении тока возбуждения. Поскольку В сложным образом зависит от I зависимость P(I) далеко нелинейная и определяется в каждом конкретном случае путем сложных численных приближений или экспериментально. Обмотка вторичного элемента выполняется обычно проводом ПЭВ-1, ПЭВ-2 с плотностью тока  . Питание двигателей импульсное с широтно-импульсной модуляцией и частотой около 2кГц. Поскольку усилия развиваемые двигателем невелики (обычно несколько десятков Н), то желательно использовать направляющие с минимальным трением, например, аэростатические, или магнитную подушку. При наличии датчика положения и обратной связи точность позиционирования таких систем составляет доли мкм. Суммарная величина перемещений достигает нескольких сантиметров. Скорость перемещения является функцией тягового усилия и составляет от нескольких мм/c до нескольких см/с. При наличии направляющих низкого трения особые трудности возникают при торможении каретки, которому в заданную точку позиционирования нужно выходить на низких, ползучих скоростях. Для торможения используют реверс тока и другие приемы как электрические, так и механические, например введение механических или электромагнитных тормозных устройств. Механический способ торможения сильно усложняет конструкцию систем позиционирования. Электрические способы торможения значительно уменьшают КПД системы, однако при малых мощностях на это не обращают внимание.
. Питание двигателей импульсное с широтно-импульсной модуляцией и частотой около 2кГц. Поскольку усилия развиваемые двигателем невелики (обычно несколько десятков Н), то желательно использовать направляющие с минимальным трением, например, аэростатические, или магнитную подушку. При наличии датчика положения и обратной связи точность позиционирования таких систем составляет доли мкм. Суммарная величина перемещений достигает нескольких сантиметров. Скорость перемещения является функцией тягового усилия и составляет от нескольких мм/c до нескольких см/с. При наличии направляющих низкого трения особые трудности возникают при торможении каретки, которому в заданную точку позиционирования нужно выходить на низких, ползучих скоростях. Для торможения используют реверс тока и другие приемы как электрические, так и механические, например введение механических или электромагнитных тормозных устройств. Механический способ торможения сильно усложняет конструкцию систем позиционирования. Электрические способы торможения значительно уменьшают КПД системы, однако при малых мощностях на это не обращают внимание.
Рисунок 5.10 - Изменение скорости при точной остановке двигателя.
Дата добавления: 2016-12-16; просмотров: 2719;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
