Силовой анализ (исследование) механизма
Силы, действующие на звенья механизма
При проектировании и расчете машин необходимо знать и уметь определять все силы, действующие на звенья механизма.
Силы подразделяются на:
а) Движущие силы – силы, приводящие механизм в движение, т.е. совершающие полезную работу
- в двигателях внутреннего сгорания – это сила давления сгорающих газов на поршень;
- в электродвигателях – это вращающий момент, приложенный к ротору со стороны вращающегося электромагнитного поля.
б) Силы полезного сопротивления – это силы, которые совершают требуемую работу, т.е. силы, для преодоления которых создается механизм или машина (привод строгального станка)
в) Силы вредного сопротивления – это силы трения в кинематических парах и силы сопротивления среды (сопротивление воздуха)
г) Силы тяжести – совершают либо положительную, либо отрицательную работу (в зависимости от направления движения звена). Они зависят от размеров звеньев и материалов.
д) Силы инерции – обусловлены массой и движением звеньев с ускорением.
е) Реакции кинематических пар, т.е. силы, с которыми одно звено действует на другое.
Для того чтобы определить все силы, действующие на звенья механизма, сначала определяют структурные группы Ассура (диады).
Принцип Даламбера.
Если к телу, на которое действуют внешние силы и реакции связей, приложить силы инерции, то можно условно рассматривать это тело как находящееся в равновесии.
Рассмотрим силы, которые действуют на диаду шатун-ползун:
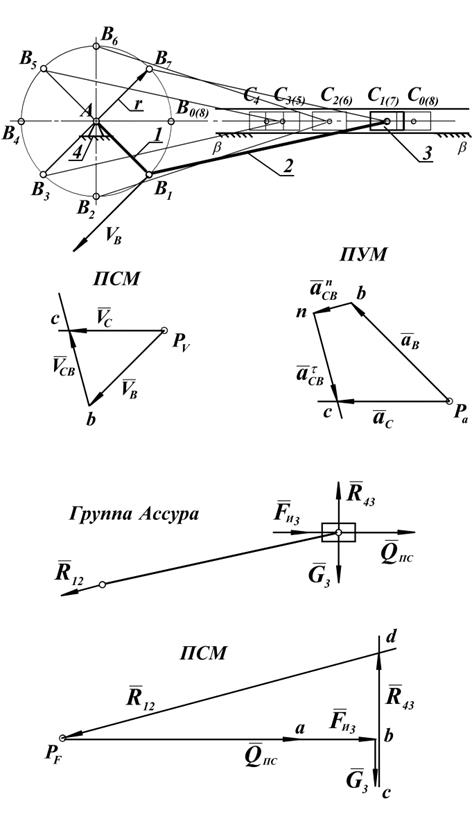
Рисунок 2.3 – План положений, скоростей, ускорений и план сил механизма
G3 - вес ползуна;
Qпс - сила полезного сопротивления;
Fи3 - сила инерции ползуна 3;
R1 2 - реакция со стороны отброшенного кривошипа 1 на шатун 2;
R4 3 – реакция, действующая со стороны звена 4 на звено 3.
1) Составляем векторное уравнение.
Под действием указанных сил группа Ассура находится в равновесии, описываемом векторным уравнением:
 ,
,
 - дается по заданию, известна по величине и направлению (противоположно скорости ползуна);
- дается по заданию, известна по величине и направлению (противоположно скорости ползуна);
 - известна по величине и направлению;
- известна по величине и направлению;
 - известна по величине и направлению (направленная противоположно ускорению ползуна);
- известна по величине и направлению (направленная противоположно ускорению ползуна);
R1 2 – известна по направлению (параллельно шатуну 2);
R4 3 – известна по направлению (перпендикулярно направляющей ползуна).
2) Проводим вектор силы полезного сопротивления (отрезок  длиной 70 мм).
длиной 70 мм).
3) Определяем масштаб плана сил механизма:
 .
.
4) С учетом масштаба определяем отрезок  , отображающий силу инерции ползуна, и отрезок
, отображающий силу инерции ползуна, и отрезок  , отображающий силу тяжести полуна:
, отображающий силу тяжести полуна:
 ,
,  .
.
5) Из полюса плана сил  параллельно шатуну 2 проводим линию действия реакции кривошипа на шатун
параллельно шатуну 2 проводим линию действия реакции кривошипа на шатун  , а из точки
, а из точки  - направление действия реакции направляющей
- направление действия реакции направляющей  на ползун
на ползун  . Таким образом, получаем точку их пересечения
. Таким образом, получаем точку их пересечения  , отсекающую отрезки
, отсекающую отрезки  и
и  .
.
6) Величины реакций находим с учетом масштаба плана сил механизма:
 ;
;  .
.
7) Определим движущий момент и мгновенную мощность.
Определим плечо h* силы  относительно точки А и вычислим с учетом масштаба его длину h (mL 1:1).
относительно точки А и вычислим с учетом масштаба его длину h (mL 1:1).
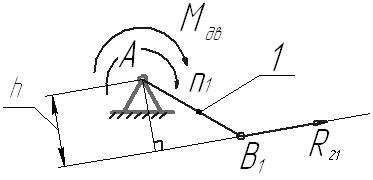
Тогда движущий момент, создаваемый реакцией  на плече h, будет равен:
на плече h, будет равен:
 .
.
Мгновенная мощность составит:
Сопротивление материалов
Общие сведения
Любая машина или конструкция помимо элементов, обеспечивающих своё функциональное назначение, имеет несущие конструкции, обеспечивающие прочность, жесткость и устойчивость (силовой каркас).
Сопротивление материалов – является наукой о прочности, жёсткости и устойчивости элементов конструкции.
Основные понятия и определения.
Работоспособность детали – это способность выполнять заданные функции, сохраняя эксплуатационные показатели в заданных нормативных пределах.
Работоспособность зависит от свойств материала.
В курсе «сопротивление материалов» рассматриваются три критерия работоспособности:
Прочность – способность детали выдерживать внешние нагрузки без разрушения.
Жесткость – способность детали сопротивляться изменению формы и размеров под действием внешних сил.
Устойчивость – способность конструкции (стержня) сопротивляться изменению формы при осевом сжатии.
Дата добавления: 2021-03-18; просмотров: 654;
Поиск по сайту
Узнать еще
- I. Ситуационный анализ внутренней деятельности.
- II. Темы рефератов, ориентированные на исследование и анализ методологических идей и концепций крупнейших представителей современной философии и естествознания.
- III этап – Анализ выступления.
- PEST-анализ для стоматологической клиники
- PEST-анализ состоит в выявлении и оценке влияния факторов макросреды на результаты текущей и будущей деятельности предприятия.
- STEP (PEST) -анализ
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- А. Рентгенофазовый анализ (РФА).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
