Правила структурного анализа
1. Отсоединение структурных групп следует начинать с группы, наиболее удаленной от ведущего звена.
2. В первую очередь отсоединяют наиболее простые структурные группы – диады.
3. Необходимо следить, чтобы степень подвижности механизма оставалась после отсоединения диад прежней.
4. Звенья и кинематические пары могут входить только в одну структурную группу.
Лекция 2
Теория механизмов и машин (ТММ)
Кинематический анализ механизмов. Планы положений, скоростей, ускорений. Силовой и динамический анализ механизмов.
2. Кинематический анализ (исследование) механизмов
Кинематический анализ (исследование) механизмов – это аналитический и графический процесс расчета, в результате которого определяются
- перемещения и траектории;
- скорости;
- ускорения.
Методы кинематического анализа:
а) графический или графоаналитический – нагляден, но менее точен;
б) аналитический – точный, но более сложный.
План положений механизма (ППМ)
План положений механизма – это масштабное графическое изображение кинематической схемы механизма для заданного положения ведущего звена.
План положений механизма вычерчивается в определенном масштабе
 ,
,
где  - фактическая длина шатуна;
- фактическая длина шатуна;
 - длина отрезка, изображающего шатун на чертеже.
- длина отрезка, изображающего шатун на чертеже.
План скоростей механизма (ПСМ)
План скоростей механизма – это векторное графическое изображение скоростей точек механизма для заданного положения ведущего звена.
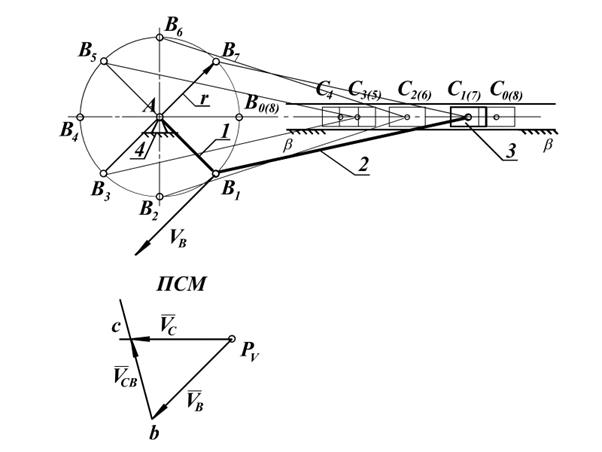
Рисунок 2.1 – План положений и план скоростей механизма
Последовательность построения плана скоростей механизма:
1) определяем угловую и линейную скорость точки В
 ,
,  .
.
2) составляем векторное уравнение для скорости точки С
 ,
,
где  - вектор скорости точки В (известен по величине и по направлению – перпендикулярно кривошипу);
- вектор скорости точки В (известен по величине и по направлению – перпендикулярно кривошипу);
 - вектор относительной скорости точки С (неизвестно по величине, известно по направлению – перпендикулярно звену СВ) из точки b на ПСМ;
- вектор относительной скорости точки С (неизвестно по величине, известно по направлению – перпендикулярно звену СВ) из точки b на ПСМ;
 - вектор скорости точки С (известен по направлению – параллельно направляющим ползуна
- вектор скорости точки С (известен по направлению – параллельно направляющим ползуна  ).
).
3) Под планом положений механизма изображаем вектор скорости точки В перпендикулярно кривошипу (отрезок  длиной 50 мм).
длиной 50 мм).
4) принимаем масштаб ПСМ
 .
.
5) точка пересечения линий действия скоростей  и
и  отсекает отрезки
отсекает отрезки  и
и  , величину которых находим с учетом масштаба ПСМ
, величину которых находим с учетом масштаба ПСМ
 ,
,  .
.
6) определяем угловую скорость 2-го звена
 .
.
План ускорений механизма (ПУМ)
План ускорений механизма – это векторное графическое изображение ускорений точек механизма для заданного положения ведущего звена.
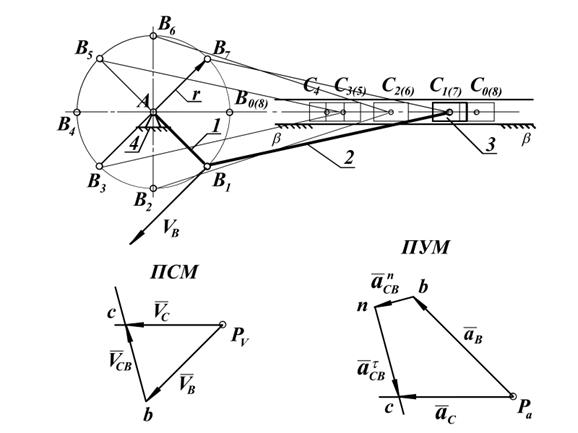
Рисунок 2.2 – План положений, скоростей и ускорений механизма
1) ускорение точки В кривошипа при постоянной частоте вращения равно нормальному и направлено от точки В к точке А
 .
.
2) составляем векторное уравнение для определения ускорения точки С
 ,
,
где  - нормальное относительное ускорение точки С, направленное от точки С к точке В
- нормальное относительное ускорение точки С, направленное от точки С к точке В
 ;
;
Тангенциальное относительное ускорение и ускорение точки С известны только по направлениям:  ,
,  - параллельно направляющим ползуна.
- параллельно направляющим ползуна.
3) Изобразим вектор ускорения точки В параллельно ВА из полюса плана ускорений  (отрезок
(отрезок  на плане ускорений длиной 50 мм).
на плане ускорений длиной 50 мм).
4) выберем масштаб плана ускорений
 ,
,
5) Отрезок на плане ускорений  , отображающий нормальное относительное ускорение
, отображающий нормальное относительное ускорение  и направленное из точки
и направленное из точки  ПУМа параллельно звену, вычисляем с учетом масштаба
ПУМа параллельно звену, вычисляем с учетом масштаба

и проводим вектор ускорения  соответствующей длины (направление вектора
соответствующей длины (направление вектора  от точки С к точке В на ППМ).
от точки С к точке В на ППМ).
5) Из полученной точки  плана ускорений проводим линию действия тангенциального относительного ускорения
плана ускорений проводим линию действия тангенциального относительного ускорения  перпендикулярно звену СВ, а из полюса
перпендикулярно звену СВ, а из полюса  плана ускорений проводим линию действия ускорения вдоль направляющей
плана ускорений проводим линию действия ускорения вдоль направляющей  . Точка пересечения С отсекает отрезки с и
. Точка пересечения С отсекает отрезки с и  , отображающие ускорения и , величину которых рассчитываем с учетом масштаба:
, отображающие ускорения и , величину которых рассчитываем с учетом масштаба:
 ;
;
 .
.
6) Поскольку тангенциальное ускорение 1-го звена  равно нулю, то и угловое ускорение также равно нулю
равно нулю, то и угловое ускорение также равно нулю
 .
.
Угловое ускорение 2-го звена равно:
 .
.
Дата добавления: 2021-03-18; просмотров: 740;
Поиск по сайту
Узнать еще
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- III. СТРОИТЕЛЬНЫЕ НОРМЫ И ПРАВИЛА
- IV тип реакций. Реакции электрофильного замещения в ядре идут в соответствии с правилами замещения
- IV. Основные правила речи
- АВС – метод анализа запасов
- Автоматизация процесса регрессионного анализа с помощью функций MS EXCEL
- Актуальность анализа зарубежных концепций
- Алгоритм анализа педагогической ситуации и решения педагогических задач.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
