Способ замены плоскостей проекций
Сущность способа замены плоскостей рассмотрим на примере. На (рис. 5.1). дана точка А в системе плоскостей проекций p1 / p2. Заменим одну из них, например p2, другой вертикальной плоскостью p4 ^ p1, т.е. перейдём к новой системе плоскостей проекций p4 / p1. Определим новую фронтальную проекцию точки А4, использую для этого неизменность координаты Z точки А, т.к. горизонтальная плоскость проекций p1 является общей для исходной и новой системы. На эпюре из горизонтальной проекции А1 проведём линию связи, перпендикулярную к новой оси x14 и отложим координату Z точки А.
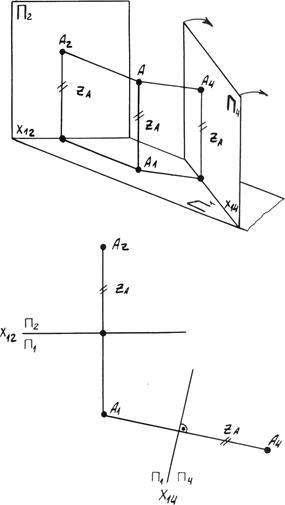
Рис. 5.1. Способ замены плоскостей.
Способом замены плоскостей определяют натуральную величину прямой, плоскости, определяют расстояние между прямыми, плоскостями и т.д. При решении задач приходится менять последовательно либо одну, либо две плоскости проекций так, чтобы геометрические объекты оказались в частном положении относительно новой системы.
Рассмотрим задачи на преобразование прямой и плоскости:
Задача: Дана прямая АВ общего положения (рис. 5.2). Преобразовать прямую АВ в проецирующую прямую.
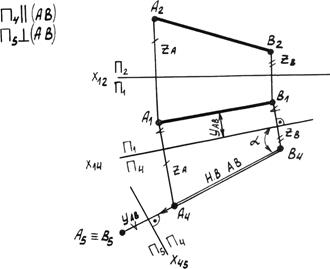
Рис. 5.2.
Решение: Прямую общего положения возможно преобразовать в проецирующую прямую только двумя последовательными заменами плоскостей проекций. Т.к. плоскость проекций, перпендикулярная к прямой общего положения, не будет перпендикулярна не к p1, не к p2. Первоначально заменим плоскость проекций p2 на p4 (^ p1) параллельно прямой АВ, новая ось проекций x14 || А1В1. Построим новую фронтальную проекцию А4В4, отложив неизменную координату Z. Прямая АВ преобразована в новой системе p1 / p4 во фронталь, А4В4 – натуральная величина отрезка прямой, а угол a - угол наклона прямой к плоскости проекций p1. Затем заменим плоскость проекций p1 на p5 (^ p4) перпендикулярно прямой АВ, новая ось проекций x45 ^ А4В4. Построим новую горизонтальную проекцию А5В5, отложив неизменную координату Y, прямая АВ, Выражается в точку A5 º B5 и является горизонтально – проецирующей прямой в новой системе плоскостей p4 / p5.
Задача: Даны две параллельные прямые линии АВ и СD (рис. 5.3). Определить расстояние между ними.
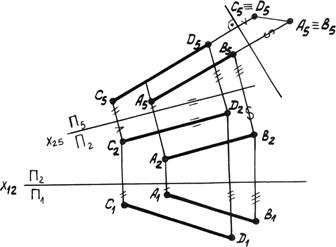
Рис. 5.3.
Решение: Чтобы определить расстояние между параллельными прямыми, необходимо преобразовать их в проецирующие прямые. Этого можно добиться двумя последовательными заменами плоскостей проекций. Первая замена плоскости проекций p1 на p5 параллельно данным прямым, новая ось проекций Х25 || С2D2 || А2В2. Прямые АВ и СD преобразованы в новой системе плоскостей проекций p2 / p5 в горизонтали. Вторая замена плоскости проекций p2 на p4 перпендикулярно прямым АВ и СD, новая ось проекций x45 ^ С5D5 ^ (А5В5) На новую горизонтальную плоскость p5 прямые АВ и СD проецируются в точки A5 º B5, C5 º D5. Измеряем расстояние между точками.
Задача: Дана плоскость, треугольник АВС общего положения (рис. 5.4). Определить натуральную величину треугольника АВС.
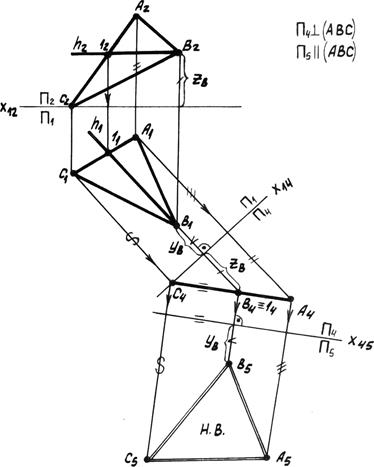
Рис. 5.4.
Решение: Чтобы определить натуральную величину плоскости, необходимо расположить её параллельно плоскости проекций. Плоскость общего положения невозможно сразу преобразовать в плоскость уровня, т.к. параллельная ей новая плоскость проекций не будет перпендикулярна ни к p1, ни к p2. Поэтому, необходимо выполнить две последовательные замены плоскостей проекций, преобразовав данную плоскость сначала в проецирующую, а затем в плоскость уровня.
Заменим плоскость проекций p2 на p4 перпендикулярно треугольнику АВС. Чтобы определить направление p4, проведём в треугольнике АВС горизонталь h. Новая плоскость проекций p4 будет перпендикулярна горизонтали, новая ось проекций x14 ^ h1. На линии связи откладываем неизменные координаты ZA, ZB, ZC. Новая фронтальная проекция A4B4C4 в системе плоскостей p1/p2 представляет собой прямую линию, плоскость (АВС) преобразована во фронтально проецирующую.
Затем заменим плоскость проекций p1 на плоскость p5 параллельно треугольнику АВС, новая ось проекций x45 || А4В4С4, неизменной остаётся координата Y. В новой системе плоскостей p4 / p5 треугольник АВС является горизонтальной плоскостью уровня. Новая горизонтальная проекция А5В5С5 – натуральная величина треугольника АВС.
Способ вращения
Суть способа вращения состоит в том, что геометрический объект вращают в пространстве вокруг выбранной оси i до требуемого положения относительно плоскостей проекций. Траектории движения точек объекта являются дугами окружностей, центр которых находится на оси вращения.
Дата добавления: 2016-11-26; просмотров: 5293;
Поиск по сайту
Узнать еще
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу
- I. Способы представления переменного синусоидального тока и напряжения.
- II. Решение логических задач табличным способом
- MS Word. Выделение текста. Понятие фрагмента текста. Способы форматирования фрагментов, работа с фрагментами (копирование, удаление, перемещение).
- V. СПОСОБЫ ПОЛУЧЕНИЯ И ХИМИЧЕСКИЕ СВОЙСТВА АЦЕТИЛЕНОВЫХ И ДИЕНОВЫХ УГЛЕВОДОРОДОВ
- VII. Риски и способы их минимизации
- XII. ДОПОЛНИТЕЛЬНЫЕ ТРЕБОВАНИЯ ПРИ ГИДРАВЛИЧЕСКОМ СПОСОБЕ ДОБЫЧИ УГЛЯ
- Yandex_direct_print() Теплоизоляция - требования, способы крепления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
