Классификация автоматических систем регулирования
Классификация АСР производится по довольно большому количеству признаков, рассмотрим ее в классическом варианте.
1.По принципу регулирования различаются два типа АСР:
АСР по отклонению характирезуется тем, что регулирующее воздействие на объект регулирования формируется в зависимости от отклонения текущего значения регулируемой величины от заданного. На этом принципе были разработаны первые промышленные регуляторы уровня воды И.И. Ползуновым (1765 г.) и скорости Дж. Уаттом (1784 г.).
АСР по возмущению( принцип компенсации) характеризуется тем, что измеряя возмущающее воздействие на объект регулирования и формируя соответствующее регулирующее воздействие на объект, можно обеспечить независимость работы системы от этих возмущающих воздействий. Такие АСР, инвариантные (независимые) от возмущающих воздействий (рис. 3.1), отличаются быстротой реакции и хорошими характеристиками по устойчивости и качеству регулирования. Однако сложность измерение всех возмущающих воздействий создает трудности в реализации подобных систем и поэтому они не получали широкого распространения.
Как видно из рис. 3.2, здесь измеряется не возмущение, а отклонение регулируемой величины от заданного закона изменения – ошибка Δ(t). Если
Δ (t) ≠ 0, автоматический регулятор создает регулирующее воздействие у(t)
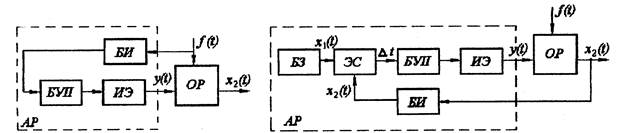
| Рис. 3.1 Функциональная схема АСР по возмущению: ОР - объект регулирования; БИ – блок измерения; БУП – блок управления; ИЭ – исполнительный элемент; f(t)- возмущающее воздействие; АР – автоматический регулятор. | Рис. 3.2. Функциональная схема АСР пол отклонению: ОР – объект регулирования; БИ – блок измерения; БЗ – блок задания; ЭС – элемент сравнения; БУП – блок управления; ИЭ – исполнительный элемент; АР – автоматический регулятор. |
на объект регулирования, ликвидирующее ошибку до допустимой величины. Системы, работающие по ошибке (отклонению), образуют замкнутый контур и поэтому называются замкнутыми системами. Благодаря наличию связи между выходом объекта и входом автоматического регулятора образуется, так называемая, обратная связь. А так как на элементе сравнения при определении ошибки происходит вычитание x2(t) из x1(t), то обратная связь называется отрицательной. Поэтому АСР, работающие по ошибке, представляют собой системы с отрицательной обратной связью, которая служит для измерения результата действия системы. Обе рассмотренные системы относятся к одноконтурным АСР.
Принцип обратной связи широко используется в технике, не только в АСР. То есть обратные связи присутствуют в измерительных и вычислительных устройствах, усилителях и т. д. Взаимодействие человека с различными техническими устройствами часто также происходит при наличии обратных связей, т.к. человек постоянно контролирует результат своего вмешательства в работу того или иного устройства, агрегата и т.п. Таким образом, принцип обратной связи является одним из основных принципов управления и регулирования, а АСР, работающие по ошибке, наиболее распространены в различных отраслях промышленности.
Однако АСР по отклонению имеют и определенный недостаток: чтобы ликвидировать отклонение регулируемой величины от заданного значения, необходимо наличие этого отклонения, тогда как в АСР по возмущению ликвидируется сама причина возникновения ошибки. Объединением обоих принципов регулирования в одной АСР создается комбинированная АСР, лишенная недостатков каждой из систем в отдельности. Наличие в ней разомкнутого контура обеспечивает независимость регулируемой величины от одного из наиболее значительного по своему влиянию возмущения. А наличие замкнутого контура (обратной связи) ликвидируют влияние всех других возмущающих воздействий и неточностей компенсации.
2. По характеру изменения заданного значения регулируемой величины xзд(t) = x1(t) АСР подразделяются на:
системы стабилизации, предназначенные для поддержания заданного значения регулируемой величины объекта, xзд(t) = const;
системы программного регулирования, в которых регулируемая величина объекта изменяется по заданной программе, xзд(t) = f (t);
следящие системы регулирования, в которых характер изменения выходной величины зависит от характера изменения какой-либо входной величины объекта, xзд(t) ≠ f(t).
3. АСР в зависимости от свойств системы в установившемся режиме разделяют на статические и астатические.
Статические системы характеризуются наличием остаточного отклонения регулируемой величины в установившемся состоянии равновесия, а величина отклонения при этом зависит от величины возмущающего воздействия на объект.
Астатические системы характеризуются отсутствием остаточных отклонений в установившемся состоянии равновесия.
Для статистической АСР (рис. 3.3,а) характерно то, что в установившемся состоянии количество расходуемой жидкости Qнагр (нагрузка) равно количеству поступающей через регулирующий орган жидкости Qпит. Следовательно при изменении Qнагр будет устанавливаться новое состояние равновесия со значением уровня h, которому будут соответствовать новое положение регулируемого органа (РО) и новое количество поступающей жидкости. Таким образом, новое значение регулируемой величины hуст в установившемся состоянии будет несколько отличаться от hзад, т.к. новому положению РО соответствует новое положение чувствительного элемента (поплавка), соответствующее h.
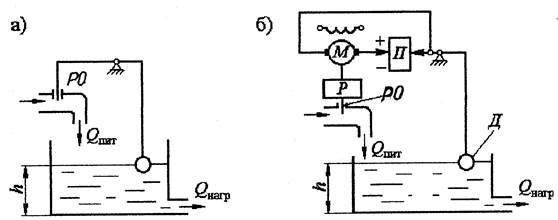
Рис 3.3. АСР уровня жидкости статическая (а) и астатическая (б).
Для астатической АСР уровня (рис 3.3,б) характерно то, что при отклонении уровня от состояния равновесия появляется разбаланс потенциометра П, сигнал с которого подается на двигатель М. Последний через редуктор Р перемещает РО (заслонку), изменяя количество подливаемой жидкости Qпит. Уровень жидкости восстанавливается до исходного (заданного) значения, при котором восстанавливается баланс потенциометра и двигатель М останавливается.
4. По способу передачи сигналов между элементами автоматической системы АСР подразделяются на системы непрерывного и дискретного действия.
Непрерывные АСР характеризуются тем, что входная и выходная величины ее являются непрерывными функциями времени.
Дискретные (прерывистые) АСР характеризуются тем, что содержат хотя бы один элемент, в котором при непрерывном изменении входного сигнала выходной сигнал изменяется дискретно.
5. Автоматические системы бывают линейными и нелинейными.
Линейные системы описываются линейными уравнениями.
Нелинейные системы описываются нелинейными уравнениями и более сложны при анализе их.
Большинство систем при анализе их оказываются нелинейными. Однако в ряде случаев, учитывая малые отклонения величин, с которыми работают системы в реальных технологических режимах, практически их можно считать линейными и соответственно пользоваться методом анализа линейных АСР.
Дата добавления: 2021-02-19; просмотров: 1428;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
