Понятие о плоско-параллельном движении твердого тела
Примером плоско-параллельного движения могут служить движение шатуна кривошипно-шатунного механизма, движение колеса нa прямолинейном участке пути и др.
Покажем, что любое перемещение плоской фигуры можно осуществить двумя простейшими движениями: одним поступательным и одним вращательным. Положение плоской фигуры на рис. 31, а вполне определяется отрезком А1В1. Этот отрезок можно переместить изположения І в положение ІІ - следующим образом: перенести его параллельно самому себе в положение А2  , (при этом фигура совершит поступательное перемещение), а затем повернуть отрезок вокруг точки А2 против часовой стрелки на угол φ, (фигура при этом совершит вращательное движение и займет положение ІІ). Можно поступить иначе: вначале дать фигуре поступательное перемещение до положения отрезка В2
, (при этом фигура совершит поступательное перемещение), а затем повернуть отрезок вокруг точки А2 против часовой стрелки на угол φ, (фигура при этом совершит вращательное движение и займет положение ІІ). Можно поступить иначе: вначале дать фигуре поступательное перемещение до положения отрезка В2  , а затем повернуть вокруг точки В2 против часовой стрелки опять на угол φ.
, а затем повернуть вокруг точки В2 против часовой стрелки опять на угол φ.
Точку, вокруг которой фигура совершает поворот, называют полюсом. В первом случае полюсом была точка А 2, во втором — В2. Очевидно, за полюс может быть принята произвольная точка фигуры.
 Итак, плоско-параллельное движение можно разложить на два составляющих движения: поступательное вместе с некоторым полюсом и вращательное вокруг этого полюса. Поступательная часть плоско-параллельного движения зависит от выбора полюса. Как видно из рис. 31, а, поступательное перемещение А1А2 при выборе за полюс точки А 2 не равно поступательному перемещению B1B2 при выборе за полюс точки В2.
Итак, плоско-параллельное движение можно разложить на два составляющих движения: поступательное вместе с некоторым полюсом и вращательное вокруг этого полюса. Поступательная часть плоско-параллельного движения зависит от выбора полюса. Как видно из рис. 31, а, поступательное перемещение А1А2 при выборе за полюс точки А 2 не равно поступательному перемещению B1B2 при выборе за полюс точки В2.
Рассматривая вращательную часть плоско-параллельного движения, нетрудно установить, что угол поворота не зависит от выбора полюса.
Разложение плоско-параллельного движения можно использовать для определения скоростей точек тела. Так как плоско-параллельное движение фигуры может быть представлено как сумма двух движений — поступательного и вращательного, то скорость любой точки тела В (рис. 31, б) можно представить как геометрическую сумму двух скоростей: скорости 
 движения полюса А и скорости
движения полюса А и скорости  вращательного движения точки В вокруг полюса А:
вращательного движения точки В вокруг полюса А:
 = + .
= + .
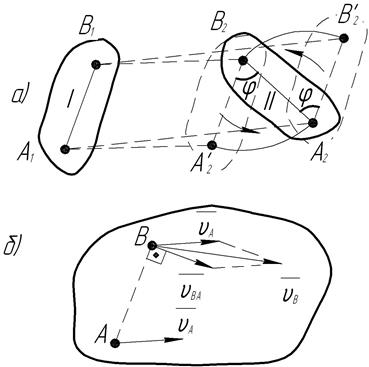
Рис. 31. Плоско-параллельное движение твердого тела.
Величина скорости вращательного движения определится по формуле
VBA = ω AB,
где ω — угловая скорость вращения точки В относительно точки А;
АВ — радиус вращения точки В относительно полюса А.
Скорость вращательного движения направлена перпендикулярно радиусу вращения АВ.
Так как вращательная часть движения не зависит от выбора полюса, то общая для всех полюсов угловая скорость ω называется угловой скоростью плоской фигуры.
Рассуждая аналогично, можно показать , что ускорение точки В запишется как
 =
=  +
+  +
+  ,
,
где аА – ускорение точки А как полюса;
 - нормальное ускорение вращения точки В вокруг точки А;
- нормальное ускорение вращения точки В вокруг точки А;
 - тангенциальное ускорение вращения точки В вокруг точки А.
- тангенциальное ускорение вращения точки В вокруг точки А.
Вектор направлен параллельно отрезку АВ в сторону полюса – точку А. Его величина определится по формуле
= ω2АВ
Вектор  перпендикулярен отрезку АВ инаправлен в сторону углового ускорения ε вращения телавокруг полюса.Его величина определится как
перпендикулярен отрезку АВ инаправлен в сторону углового ускорения ε вращения телавокруг полюса.Его величина определится как
= εАВ.
3.4. Аксиомы динамики.
В динамике рассматривается движение материальных точек или тел под действием приложенных сил; устанавливается связь между приложенными силами и вызываемым ими движением.
Динамика изучает такие системы сил, которые не находятся в состоянии равновесия. Она основывается на ряде вытекающих из опыта аксиом; некоторые из них были рассмотрены ранее в статике.
Напомним содержание первой аксиомы, так называемого закона инерции, рассмотренного в статике .
Система сил, приложенная к материальной точке, является уравновешенной, если под ее воздействием точка находится в состоянии относительного покоя или движется равномерно и прямолинейно. Таким образом, первая аксиома определяет условия, при которых система сил взаимно уравновешена и, следовательно, эквивалентна нулю.
Однако аксиома имеет еще и другой смысл, на котором следует остановиться подробнее. В случае относительного покоя или равномерного и прямолинейного движения ускорение материальной точки равно нулю. Поэтому под действием уравновешенной системы сил или при отсутствии силовых воздействий материальная точка не испытывает ускорений и движется равномерно и прямолинейно.
Когда на точку действует неуравновешенная система сил, точка будет иметь некоторое ускорение. Связь между действующей на точку силой и ускорением, вызываемым этой силой, устанавливается второй аксиомой динамики, которая заключается в следующем:
Ускорение  , сообщаемое материальной точке приложенной к ней силой
, сообщаемое материальной точке приложенной к ней силой  , имеет направление силы и по величине пропорционально ей (рис. 32, а):
, имеет направление силы и по величине пропорционально ей (рис. 32, а):
= т ,
где m — коэффициент пропорциональности, связывающий силу с ускорением, появившимся в результате приложения силы.
Уравнение называется основным уравнением динамики в векторной форме. Оно справедливо также и в скалярной форме
Р = та.
Различие между первой и второй формами заключается в том, что векторная форма уравнения учитывает направление векторов силы и ускорения, а скалярная форма учитывает только численные значения этих величин.
Коэффициент т, входящий в основное уравнение динамики, имеет очень важное физическое значение. Он представляет собой массу материальной точки.
Если решить уравнение относительно ускорения, получим
а =  .
.
Из этого уравнения видно, что чем больше масса, тем большая сила потребуется для сообщения телу определенного ускорения. Следовательно, масса характеризует «инертность», или «неподатливость» тела воздействию силы.
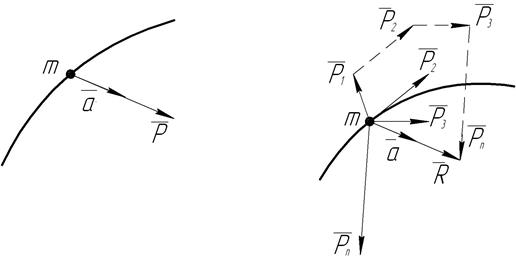
Рис. 32. Векторы силы и ускорения.
Таким образом, масса материальной точки является мерой ее «инертности».
Для вращательного движения тела основное уравнение динамики имеет вид
 = I
= I  ,
,
где I – момент инерции тела (мера инертности тела во вращательном движении); ε - угловое ускорение.
Приведем формулировку аксиомы независимости действия сил.
Если на материальную точку действует несколько сил, то ускорение, получаемое точкой, будет таким же, как при действии одной силы, равной геометрической сумме этих сил (рис. 32, б), т. е.
т =  +
+  +
+  + . . .+
+ . . .+  =
=  ,
,
где - равнодействующая системы сил, приложенных к рассматриваемой точке.
Остановимся на последней аксиоме динамики — аксиоме взаимодействия, знакомой из статики.
Всякому действию соответствует равное и противоположно направленное противодействие. Иными словами, силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю и направлены по прямой, соединяющей эти точки, в противоположные стороны.
3.5. Понятие о силах инерции. Метод кинетостатики
Рассмотрим материальную точку А, на которую действует некоторая система сил , , . . ., (рис. 33). Среди действующих сил могут быть заданные активные силы, а также реакции связей.
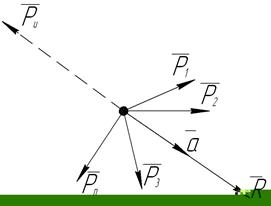
Рис.33. Сила инерции.
На основании аксиомы независимости действия сил точка А под действием этих сил получит такое же ускорение, как если бы на нее действовала лишь одна сила, равная геометрической сумме заданных сил
т = + + + . . .+ = ,
Предположим, что кроме сил , , . . ., на точку действует еще одна сила  , по величине равная равнодействующей силе и направленная в сторону, противоположную равнодействующей силе (рис.33)
, по величине равная равнодействующей силе и направленная в сторону, противоположную равнодействующей силе (рис.33)
= - = - т = -( + + + . . .+ ).
Это уравнение можно представить в виде
(- т ) + + + + . . .+ = 0.
или
+ + + + . . .+ = 0.
Таким образом, все силы, включая силу , должны уравновешиваться, так как силы и равны между собой и направлены по одной прямой в противоположные стороны. Сила , равная произведению массы точки на ее ускорение, но направленная в сторону, противоположную ускорению, называется силой инерции.
Итак, из последнего уравнения следует, что в каждый данный момент времени силы, приложенные к материальной точке, уравновешиваются силами инерции. Приведенный вывод называют началом или принципом Даламбера; он может быть применен не только к материальной точке, но и к твердому телу или к системе тел. В последнем случае он формулируется следующим образом: если ко всем реально действующим силам, приложенным к движущемуся телу или системе тел, приложить силы инерции, то полученную систему сил можно рассматривать как находящуюся в равновесии.
Следует подчеркнуть, что силы инерции действительно существуют, но приложены не к движущемуся телу, а к тем телам, которые вызывают движение, т. е. к связям.
Применение принципа Даламбера позволяет свести решение динамических задач к использованию уравнений равновесия, т. е. к замене задачи динамики эквивалентной ей задачей статики. Такой прием решения задач динамики носит название метода кинетостатики.
ГЛАВА 4. ОСНОВЫ ТЕОРИИ МЕХАНИЗМОВ И МАШИН.
Дата добавления: 2016-10-26; просмотров: 2120;
Поиск по сайту
Узнать еще
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- I. Выборы: понятие, значение и виды.
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- I. Понятие политического лидерства.
- I. Понятие политической власти.
- I. Понятие, происхождение и признаки государства.
- I.1.7 ДВИЖЕНИЕ ТЕЛА ПО ОКРУЖНОСТИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
