Двигатели, применяемые в подъемно-транспортных машинах
В приводах ПТМ применяют следующие типы двигателей: электрические постоянного и переменного тока (также электромагниты), тепловые (двигатели внутреннего сгорания), гидравлические и пневматические двигатели.
Различные типы двигателей обладают соответствующими достоинствами и недостатками.
Электродвигатели (ЭД) отличает самый высокий КПД, относительно низкая стоимость, возможность пуска под нагрузкой, большая перегрузочная способность, относительная простота управления, дешевизна энергии. Недостатками ЭД являются необходимость токоподвода, относительно большой вес на единицу мощности.
К достоинству теплового двигателя можно отнести его автономность, не-достатками являются более низкий КПД, низкая перегрузочная способность, невозможность пуска под нагрузкой, дорогое топливо, экологическая опасность. Моторный привод используется в машинах, работающих автономно (плавучие краны, пневмоколесные и гусеничные краны, автопогрузчики), как правило, в комбинированном виде двигатель(и) внутреннего сгорания (ДВС)-генератор-ЭД или ДВС-гидропривод.
Гидродвигатель является системой состоящей из нескольких механизмов, передаточного гидравлического механизма и ЭД или ДВС. Гидродвигатели поступательного движения – гидроцилиндры, вращательного движения - гидромоторы. Достоинства гидродвигателя – низкая динамичность работы и возможность плавного регулирования. Недостатки – низкий КПД, сложность эксплуатации.
Достоинства и недостатки пневмопривода повторяют достоинства и недостатки гидродвигателя. Чаще всего они используются для управления, в приводах испытывающих небольшие нагрузки.
Электрический привод может быть переменного и постоянного тока. Более широко применяется привод переменного тока. Это объясняется тем, что переменный ток является промышленным током. Для получения постоянного тока нужны специальные выпрямители или генераторы. Преимущество привода постоянного тока заключается в возможности работать с повышенной скоростью при малых нагрузках, простое регулирование скорости и возможность рекуперации тока. Надежность аппаратуры управления на постоянном токе обычно выше, чем при работе на переменном токе. Недостатками электродвигателей постоянного тока являются их большие габариты, масса и стоимость.
Наиболее распространен в портовых ПТМ трехфазный асинхронный электродвигатель переменного тока.
Трехфазные ЭД бывают короткозамкнутые и с фазным ротором. Для машин непрерывного действия выбираются ЭД общего назначения (общепромышленные, серий 4А, 5А, АИР и др.). Для частых пусков (машины циклического действия) следует выбирать специальные «крановые» ЭД переменного тока, которые рассчитаны на работу в повторно-кратковременном режиме (многократные включения-выключения механизма за цикл, например, механизм подъема). Характеристикой повторно-кратковременного режима работы является продолжительность включения (ПВ).
 , 73)
, 73)
где  – время цикла, с;
– время цикла, с;  – время работы механизма в цикле, с. Установлен стандартный ряд продолжительностей включения механизмов, ПВ%: 15, 25, 40, 60.
– время работы механизма в цикле, с. Установлен стандартный ряд продолжительностей включения механизмов, ПВ%: 15, 25, 40, 60.
Крановые ЭД переменного тока обозначаются как МТ(К)Б1Ц1Ц2Ц3Ц4, что означает:
МТ – машина трехфазная;
(К) – с фазным (короткозамкнутым) ротором;
Б1 – класс нагревостойкости изоляции;
Ц1 – условная величина наружного диаметра пакета статора;
Ц2 – порядковый номер серии (1);
Ц3 – условная длина пакета статора;
Ц4 – число полюсов.
Пример: МТН 613-10 - машина трехфазная с фазным ротором класса нагревостойкости изоляции Н, условная величина наружного диаметра пакета статора – 6, порядковый номер серии – 1, условная длина пакета статора – 3, число полюсов 10.
Синхронная частота вращения (частота вращения электромагнитного поля статора) определяется по зависимости
 , 74)
, 74)
где  – частота тока в цепи (Гц),
– частота тока в цепи (Гц),  – число пар полюсов.
– число пар полюсов.
Основной характеристикой привода (двигателя) является «механическая характеристика». Она характеризует зависимость между скоростью и нагрузкой. В ПТМ принято считать механической характеристикой следующую зависимость
 или
или  , 75)
, 75)
где T – обобщенная нагрузка,  - обобщенная скорость, u – управляющие воздействия.
- обобщенная скорость, u – управляющие воздействия.
Механическая характеристика может быть «мягкой» или «жесткой», т.е. скорость при изменении момента может меняться существенно или незначительно.
Регулирование скорости ЭД (жесткости механической характеристики) производится путем включения в цепь обмоток ротора дополнительных сопротивлений. Тогда естественная и искусственные характеристики будут отличатся наклоном и выглядеть следующим образом (Рис. 60).
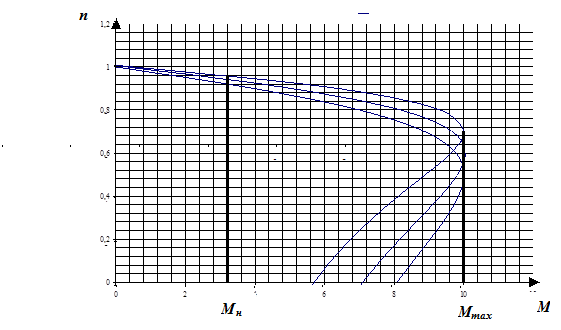
Рис. 60 Механические характеристики асинхронного ЭД.
Также в настоящее время грубое регулирование жесткости механической характеристики осуществляется путем переключения числа полюсов, плавное изменение скорости за счет использования преобразователей частоты. Такой преобразователь выдает регулируемое по частоте напряжение, величина которого изменяется пропорционально изменению частоты. Необходимо помнить, что при изменении частоты меняется отдаваемая мощность (Рис. 61).
Характеристиками ЭД являются:
 - максимальный момент ЭД, ограниченный электрозащитой, кНм (Нм);
- максимальный момент ЭД, ограниченный электрозащитой, кНм (Нм);
 (
(  ) – номинальная мощность ЭД, кВт (Вт);
) – номинальная мощность ЭД, кВт (Вт);
 – номинальная частота вращения, об/мин;
– номинальная частота вращения, об/мин;
 – момент инерции ротора, кгм2;
– момент инерции ротора, кгм2;
 - предел регулирования;
- предел регулирования;
а также перегрузочная способность (отношение опрокидывающего момента к номинальному), масса ЭД, габаритные размеры и т.д.
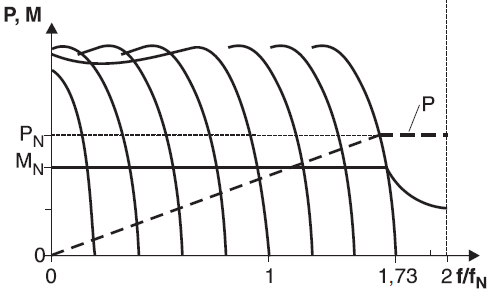
Рис. 61 Рабочие характеристики с постоянным номинальным моментом.
На Рис. 61 - отдаваемая мощность,  – номинальная мощность,
– номинальная мощность,  - крутящий момент,
- крутящий момент,  - номинальный момент, – частота тока преобразователя,
- номинальный момент, – частота тока преобразователя,  , Гц – базовая частота тока.
, Гц – базовая частота тока.
Выбор ЭД может осуществляться 3 способами.
1. По статической мощности
Используется в тех случаях, когда нагрузка за время работы механизма не меняется или меняется незначительно. По заданной внешней нагрузке определяется требуемая мощность, необходимая для выполнения рабочего движения.
Требуемая мощность определяется по зависимости, кВт
 , 76)
, 76)
где  – силы (моменты) сопротивлений выполнению рабочего движения, кН (кНм),
– силы (моменты) сопротивлений выполнению рабочего движения, кН (кНм),  - скорость выполнения рабочего движения, м/с,
- скорость выполнения рабочего движения, м/с,  – КПД всего механизма.
– КПД всего механизма.
В зависимости от типа машины выбирается ЭД ближайшей большей или ближайшей меньшей (не более 10% расхождения) мощности. Для машин циклического действия  , с последующей проверкой на нагрев (проверка работы ЭД в течение 10 мин.). Для машин непрерывного действия
, с последующей проверкой на нагрев (проверка работы ЭД в течение 10 мин.). Для машин непрерывного действия  , т.к. максимальная мощность востребуется достаточно продолжительное время (более 10 мин.).
, т.к. максимальная мощность востребуется достаточно продолжительное время (более 10 мин.).
Примеры механизмов, работающих с постоянной нагрузкой: привод конвейера, механизм подъема.
2. По эквивалентной (среднеквадратичной мощности)
Используется в тех случаях, когда нагрузка за время работы механизма меняется значительно. Момент ЭД пропорционален току, температура нагрева ЭД пропорциональна квадрату тока, тогда в качестве эквивалентной нагрузкой выбирается среднеквадратичное усилие (момент), в крайнем звене механизма, которое движется с постоянной скоростью. Среднеквадратичное усилие (момент) определяется как
 77)
77)
где  – количество интервалов на которые разбито время работы механизма,
– количество интервалов на которые разбито время работы механизма,  – среднее усилие (момент), действующее на интервале, кН (кНм),
– среднее усилие (момент), действующее на интервале, кН (кНм),  – i-ый интервал времени.
– i-ый интервал времени.
Тогда, требуемая мощность определяется по зависимости, кВт
 , 78)
, 78)
где - скорость звена механизма, для которого определено среднеквадратичное усилие (момент), м/с.
По каталогу принимается ЭД с ближайшим большим значением мощности.
Примеры механизмов, работающих с переменной нагрузкой: механизм изменения вылета, механизм выдвижения каретки.
3. По условию разгона
Если статический момент сопротивления невысок и инерционные нагрузки существенно превышают его, мощность ЭД находится из условия разгона.
Тогда требуемая мощность определяется по зависимости, кВт
 , 79)
, 79)
где  – масса (момент инерции) вращающихся частей механизма и движущихся элементов конструкции, приведенная к одному из звеньев механизма, как правило, выполняющему рабочее движение, т (тм2), - скорость звена механизма, к которому приведены движущиеся массы (моменты инерции), м/с, 1.3 – коэффициент, учитывающий внешние нагрузки,
– масса (момент инерции) вращающихся частей механизма и движущихся элементов конструкции, приведенная к одному из звеньев механизма, как правило, выполняющему рабочее движение, т (тм2), - скорость звена механизма, к которому приведены движущиеся массы (моменты инерции), м/с, 1.3 – коэффициент, учитывающий внешние нагрузки,  – желаемое время разгона, с.
– желаемое время разгона, с.
При несовпадении фактической продолжительности включения механизма (  ) со стандартной (
) со стандартной (  ) проводится пересчет мощности по зависимости
) проводится пересчет мощности по зависимости
 , 80)
, 80)
Эксплуатация с большим количеством включений и низким моментом нагрузки (S4) довольно часто встречается, например, в механизмах передвижения ПТМ. В этом случае решающим фактором при выборе типоразмера двигателя является не потребление мощности, а скорее количество его запусков, которое необходимо сравнить с допустимым.
Приблизительное допустимое количество включений двигателя можно рассчитать по следующей формуле [28], вкл/ч
 , 81)
, 81)
где  - допустимое количество включений двигателя при ПВ50 % без момента нагрузки и внешних масс, вкл/ч, определяет изготовитель,
- допустимое количество включений двигателя при ПВ50 % без момента нагрузки и внешних масс, вкл/ч, определяет изготовитель,  - коэффициент зависимости от дополнительного момента инерции,
- коэффициент зависимости от дополнительного момента инерции,  - коэффициент зависимости от момента нагрузки при разгоне,
- коэффициент зависимости от момента нагрузки при разгоне,  - коэффициент зависимости от статической мощности и продолжительности включения. Названные коэффициенты можно определять по приведенным ниже графикам (Рис. 62).
- коэффициент зависимости от статической мощности и продолжительности включения. Названные коэффициенты можно определять по приведенным ниже графикам (Рис. 62).
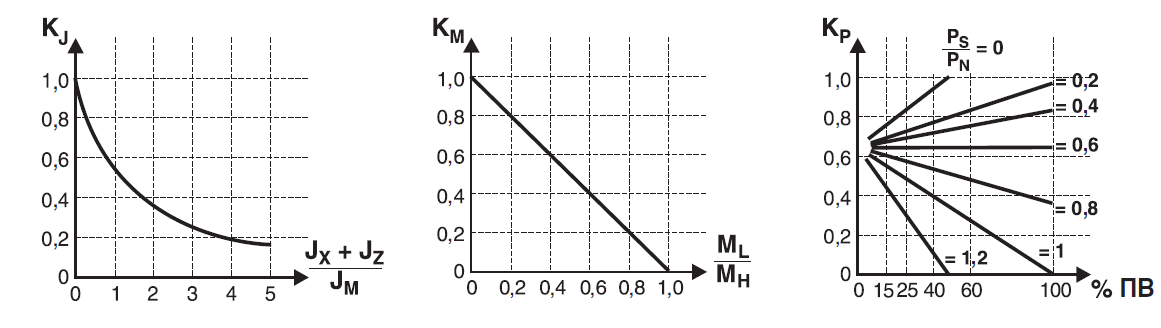
Рис. 62 Коэффициенты, уменьшающие количество включений.
На этих графиках обозначены  - момент инерции тяжелой крыльчатки (если есть),
- момент инерции тяжелой крыльчатки (если есть),  - момент нагрузки при разгоне,
- момент нагрузки при разгоне,  - динамический момент двигателя (момент сил инерции),
- динамический момент двигателя (момент сил инерции),  - статическая (требуемая) мощность, - номинальная мощность двигателя.
- статическая (требуемая) мощность, - номинальная мощность двигателя.
В некоторых случаях выбранный двигатель не в состоянии разогнаться и выйти в режим установившегося движения за требуемое время. Поэтому необходимо проводить проверку ЭД на разгон по условию
 , 82)
, 82)
здесь –расчетное время разгона механизма,  – допустимое время разгона механизма.
– допустимое время разгона механизма.
Или же, наоборот, время разгона слишком мало, тогда необходимо проверить ускорение рабочего движения
 , 83)
, 83)
здесь – скорость выполнения рабочего движения,  – максимальное расчетное ускорение,
– максимальное расчетное ускорение,  – допустимое значение ускорения.
– допустимое значение ускорения.
Допустимое значение ускорения определяется либо из условия пробуксовки механизма, либо допустимым значением инерционных нагрузок.
Точно так же необходимо проверять выбранный тормоз механизма на время торможения.
Время разгона механизма при подъеме груза или торможения при спуске в условиях равноускоренного движения определяется исходя из принципа Даламбера (Д’аламбера) (если к точке, кроме фактически действующих на ней внешних и внутренних сил, приложить соответствующие силы инерции, то полученная система сил будет находиться в равновесии и к ней можно будет применять все уравнения статики)
 , 84)
, 84)
где  – избыточный момент, составляющий разницу между движущим моментом
– избыточный момент, составляющий разницу между движущим моментом  и моментом сопротивления
и моментом сопротивления  при разгоне
при разгоне
 , 85)
, 85)
или наоборот при торможении
 , 86)
, 86)
 – момент сил инерции,
– момент сил инерции,
 – суммарный момент инерции движущихся частей механизма и внешних элементов, приведенный к одному из валов,
– суммарный момент инерции движущихся частей механизма и внешних элементов, приведенный к одному из валов,
 – угловое ускорение вала механизма, к которому был приведен момент инерции.
– угловое ускорение вала механизма, к которому был приведен момент инерции.
В качестве инерционных параметров при определении суммарного момента инерции учитываются массы и моменты инерции тех элементов, которые обладают сравнительно большой массой (массы роторов двигателей, муфт, зубчатых колес, барабанов, груза и т.д.). Приведение масс осуществляется на основании равенства кинетических энергий движения масс расчетной схемы и реального механизма.
При этом пользуются следующими положениями приведения масс:
1) равенства масс в поступательном движении,
2) равенства моментов инерции во вращательном движении,
3) равенства кинетических энергий в плоско-параллельном движении.
Момент сопротивления приводу, приведенный к валу ЭД определяется на основании равенства работ приведенного и реального моментов.
Рассмотрим определение времени разгона механизма на примере работы механизма подъема. Механизм подъема (Рис. 63) включает в себя электродвигатель 1, вал которого соединяется с быстроходным валом редуктора 5 упругой втулочно-пальцевой муфтой 2 с тормозным шкивом 3. Шкив охватывается колодками тормоза 4 механизма подъема. Внутрь барабана 7 встраивается зубчатая полумуфта, вступающая в зацепление с зубчатым венцом 6 конца тихоходного вала редуктора, на который и опирается барабан. С другой стороны барабан поддерживает опора барабана 8, представляющая собой подшипниковый узел. Канаты с барабана сбегают на полиспаст, с подвижной блоковой обоймой которого совмещено грузозахватное устройство (ГЗУ). ГЗУ – устройство для захвата груза.
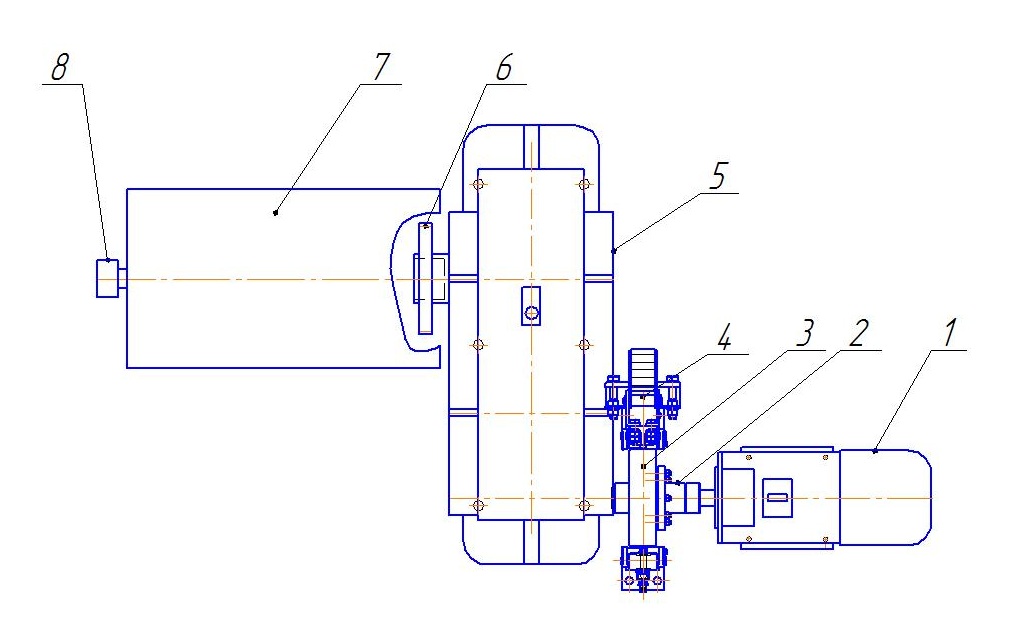
Рис. 63 Механизм подъема. Вид сверху
Номинальный момент, развиваемый ЭД в условиях установившегося движения
 , 87)
, 87)
где  – номинальная мощность ЭД, принятая по каталогу при данной ПВ, номинальная угловая скорость вала ЭД
– номинальная мощность ЭД, принятая по каталогу при данной ПВ, номинальная угловая скорость вала ЭД
 или, раскрыв,
или, раскрыв,  , 88)
, 88)
где  - номинальная частота вращения вала ЭД, принятая по каталогу при данной ПВ.
- номинальная частота вращения вала ЭД, принятая по каталогу при данной ПВ.
Отсюда
 или
или  89)
89)
При разгоне момент, развиваемый ЭД, т.н. средний пусковой момент существенно больше
 , 90)
, 90)
где  –кратность среднего пускового момента.
–кратность среднего пускового момента.
В определении моментов инерции механизма учитываем элементы, обладающие наибольшей кинетической энергией, наиболее инерционные и имеющие наибольшую скорость: это ротор ЭД с моментом инерции и упругая втулочно-пальцевая муфта (МУВП) с тормозным шкивом с моментом инерции  . Моменты инерции остальных вращающихся элементов учтены с помощью коэффициента 1.2(составляют не более 20% от муфты и ротора). Поскольку ротор и МУВП расположены на быстроходном валу, их моменты инерции приводить не нужно. Приведем массу груза с ГЗУ к валу ЭД, исходя из равенства кинетических энергий движущегося груза и элемента с приведенным моментом инерции
. Моменты инерции остальных вращающихся элементов учтены с помощью коэффициента 1.2(составляют не более 20% от муфты и ротора). Поскольку ротор и МУВП расположены на быстроходном валу, их моменты инерции приводить не нужно. Приведем массу груза с ГЗУ к валу ЭД, исходя из равенства кинетических энергий движущегося груза и элемента с приведенным моментом инерции  , вращающегося с угловой скоростью, равной угловой скорости ротора
, вращающегося с угловой скоростью, равной угловой скорости ротора  , потери кинетической энергии учтем с помощью КПД механизма
, потери кинетической энергии учтем с помощью КПД механизма 
 , 91)
, 91)
где  – масса номинального груза,
– масса номинального груза,  – масса ГЗУ,
– масса ГЗУ,  – скорость подъема груза.
– скорость подъема груза.
Тогда
 , 92)
, 92)
и
 . 93)
. 93)
Угловое ускорение вала ЭД
 , 94)
, 94)
где - время разгона.
Работы приведенного момента сопротивления на виртуальном перемещении  и груза при подъеме на высоту
и груза при подъеме на высоту  , соответствующую этому перемещению, равны, потери на трение в элементах механизма учтем с помощью КПД
, соответствующую этому перемещению, равны, потери на трение в элементах механизма учтем с помощью КПД
 , 95)
, 95)
где  – вес номинального груза,
– вес номинального груза,  – вес ГЗУ.
– вес ГЗУ.
Груз висит на  ветвях каната. Главная характеристика полиспаста - кратность полиспаста (передаточное отношение, отношение усилий на входе
ветвях каната. Главная характеристика полиспаста - кратность полиспаста (передаточное отношение, отношение усилий на входе  и выходе
и выходе  , отношение скоростей на выходе
, отношение скоростей на выходе  – скорость сматывания каната и на входе ) в данном случае совпадает с количеством ветвей, на которых подвешен груз. Натяжение в канате (без учета сопротивления в блоках) равно
– скорость сматывания каната и на входе ) в данном случае совпадает с количеством ветвей, на которых подвешен груз. Натяжение в канате (без учета сопротивления в блоках) равно  . Скорость сматывания каната
. Скорость сматывания каната  .
.
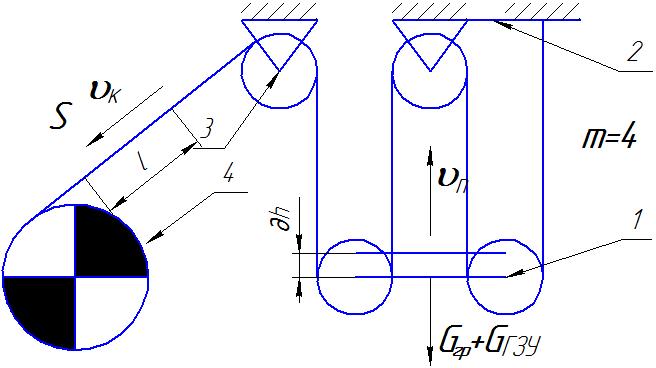
Рис. 64 Устройство полиспаста.
1 – подвижная обойма, 2 – неподвижная обойма, 3 – направляющий блок, 4 – канатный барабан.
При подъеме груза на высоту необходимо смотать канат длиной
 . 96)
. 96)
При этом барабан повернется на угол
 , 97)
, 97)
где  – диаметр барабана,
– диаметр барабана,  – диаметр каната.
– диаметр каната.
Далее, барабан соединен с тихоходным валом редуктора. Главной характеристикой редуктора является передаточное отношение  . Передаточное отношение показывает во сколько раз изменятся характеристики механического движения на входе (быстроходном валу) и выходе (тихоходном валу) редуктора. Момент на быстроходном валу
. Передаточное отношение показывает во сколько раз изменятся характеристики механического движения на входе (быстроходном валу) и выходе (тихоходном валу) редуктора. Момент на быстроходном валу  , момент на тихоходном валу
, момент на тихоходном валу  , угловая скорость на быстроходном валу
, угловая скорость на быстроходном валу  , угловая скорость на тихоходном валу
, угловая скорость на тихоходном валу  . Тогда,
. Тогда,  и
и  , и верно обратное
, и верно обратное  и
и  . А если угловая скорость увеличится, то и угол возрастет в то же количество раз
. А если угловая скорость увеличится, то и угол возрастет в то же количество раз
 . 98)
. 98)
Объединив зависимости  . 96, 𝝏
. 96, 𝝏  , 97 и 𝝏𝝋
, 97 и 𝝏𝝋  . 98 получим
. 98 получим
 . 99)
. 99)
Подставив 𝝏𝒉  . 99 в
. 99 в  , 95 и проведя необходимые преобразования, получим
, 95 и проведя необходимые преобразования, получим
 , 100)
, 100)
Подставив в зависимость  , 84 формулы
, 84 формулы  , 85,
, 85,  , 90,
, 90,  . 93, 𝜺
. 93, 𝜺  , 94,
, 94,  , 100 и перенеся момент сил инерции в правую часть, получим
, 100 и перенеся момент сил инерции в правую часть, получим
 . 101)
. 101)
Выразим из  . 101 время разгона
. 101 время разгона
 . 102)
. 102)
Заменим на , используя  или, раскрыв,
или, раскрыв,  , 88
, 88
 ,
,
или преобразуя
 .
.
С учетом  или
или  89 получаем
89 получаем
 , 103)
, 103)
Дата добавления: 2021-01-26; просмотров: 1140;
Поиск по сайту
Узнать еще
- Антибиотики и другие антимикробные препараты, применяемые для ускорения роста и повышения продуктивности животных
- В вычислительных машинах
- В4. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ МЕХАНИЗМА ДВИЖЕНИЯ НИТЕПРИТЯГИВАТЕЛЯ В МАШИНАХ РАЗЛИЧНЫХ КЛАССОВ
- ВЕЩЕСТВА, ПРИМЕНЯЕМЫЕ В КАЧЕСТВЕ ХОЛОДИЛЬНЫХ АГЕНТОВ
- Виды бухгалтерского учета. Измерители применяемые в учете
- Вопрос 70. Виды страхования применяемые при МДП.
- Вопрос 85. Меры, применяемые после ДТП при ПОГ.
- Вспомогательные средства, применяемые при холодильном хранении пищевых продуктов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
