Динамические определители
В динамических определителях объект с требуемым признака выбирается в процессе поочередного опроса состояния всех объектов. Если в некоторой совокупности имеется несколько объект с соответствующим признаком, то выбор происходит в порядка принятой очередности опроса. Время отыскания объекта зависит от емкости определителя, т. е. количества объектов, которые обслуживает, скорости его работы, а также состояния определите в момент поступления требования на отыскание объекта.
Рассмотрим принцип построения динамических электронных определителей, которые выбирают объект по одной координат, .Такой определитель можно представить как конечный [10], работа которого может быть описана четырьмя множествами:
множеством входных сигналов, несущих информацию о состоянии объектов:

множеством входных сигналов, изменяющих состояния определителя:

множеством выходных сигналов, соответствующих функции выбора объектов:

множеством внутренних состояний определителя:

Функционирование определителя в дискретные моменты времени
описывается системой двух уравнений:

е s(t) и s(t — 1) — состояния определителя соответственно в моты времени 1 и (t — 1); u(t) — сигнал (или сигналы) на входе определителя, обеспечивающий изменение его внутреннего состоял; х; — сигнал, описывающий состояние объекта.
Уравнение (13.7) представляет собой функцию, описывающую родной сигнал определителя, т. е. функцию выбора объекта, а (13.8) — функцию перехода определителя из одного состоит в другое. Каждому состоянию определителя приписывается соответствующий координатный сигнал выбора объектаследовательно, координатный сигнал вписывается функцией внутреннего состояния определителя:

Определитель соответствующих объектов можно представить устройство, состоящее из двух частей: счетной схемы А определяющей координаты объектов Х и дешифратора реализующего функцию выбора объекта f, (рис. 13.1). Функционирование
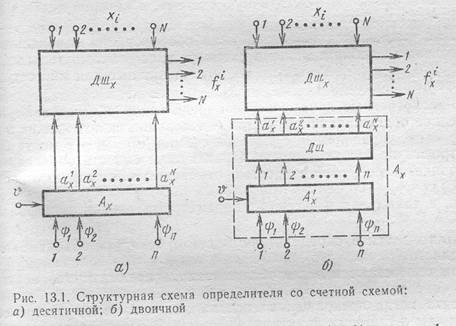
схемы А описывается (13.8) и (13.9); а дешифратора Дш,— уравнением (13.7). Каждому состоянию счетной схемы А динамического определителя соответствует координатный сигнал выбора а, одного из N объектов. Таким образом, число состояний счетной схемы определяется емкостью определителя (числом выходов ). Дешифратор представляет собой совокупность схем типа И, реализующих функции выбора соответствующих объектов. Число схем определяется количеством обслуживаемых объектов Для однокоординатного
определителя каждая схема типа И имеет два входа, на один из которых поступает сигнал х, описывающий состояние объекта Х, а на второй — координатный сигнал а формация о состоянии объектов должна поступать в определи или из оконечных устройств, или из оперативных запоминаю устройств ОЗУ, хранящих эту информацию.
При построении счетной схемы на N выходов в десятичной счисления (рис. 13.la) число элементов памяти и дол быть равно N+ I. Из них N элементов памяти используются запоминания значения координаты и выдачи соответствую сигналов а, а один элемент применяется для подготовки схем к приему информации.
При двоичной системе счисления число элементов уменьшается и составляет n=logqN, где NN (N' — ближайшее к N целое число, при котором также будет целы числом). Однако в этом случае появляется необходимость в уст ковке дешифратора Дш, через который выдаются сигналы а (рис. 13.1б). Дешифратор служит для перехода двоичной системы счисления, в которой записывается ординаты объектов, в десятичную систему, в которой ведется см выбираемых объектов.
Для уменьшения общего объема оборудования определителе с двоичными .избирательными схемами вместо прямоугольных а шифраторов можно использовать пирамидальные или дешифраторы [20].
Рассмотренные динамические определители обеспечивают поочередное обслуживание объектов — в порядке включения их в и. шифратор, управляемый с выходов счетной схемы, — и могут быть построены на любую емкость. Практически емкость определители ограничена требуемой скоростью отыскания объектов, скорость переключения элементов, на которых выполнена схема определи. теля, а также электрическими параметрами диодов дешифратор.
Динамические определители могут отыскивать объекты исходного (начального) положения, так и с того положения, в котором они остаются после обслуживания предыдущего объекта Эти определители хранят информацию о координатах выбранного объекта после прекращения сигнала из оконечного устройство (сигналы х;). Время, хранения информации определяется условия. ми работы управляющего устройства и ограничивается временем поступления на вход определителя сигнала, переводящего его следующее состояние. Следовательно, такой определитель представляет собой оперативное запоминающее устройство (ОЗУ), которое сохраняет информацию о координатах выбранного объекта время установления соединения через данную ступень искания ил всю КС узла. Это свойство динамического определителя позволяет сравнительно просто решать задачу повторных соединений, контроля за правильностью доставки информации и др.
Наличие блока памяти в динамическом определителе возможность использовать его в режиме как свободного, так и вынужденного искания. В последнем случае, кроме общего (счетное ) входа, каждый элемент памяти должен иметь отдельный вход, в который поступает информация со стороны регистра или кодовое приемника. Благодаря этому определитель можно принудительна останавливать в состояние выдачи требуемого координатного сигнала а. Рассмотренный ранее определитель, производящий выбор одного 5ъекта из N только по одной координате i, может быть построен как двухкоординатный. В таком определителе все N объектов разбиваются на А групп по и объектов в каждой группе (М=Ап), ля выбора объекта в определителе необходимо знать две координаты: координату r группы 8„ к которой принадлежит объект, якоординату i объекта Х внутри группы, где r = 1, 2,..., А, а i =l, ,...,n.
Функция выбора объекта в таком определителе представляет Собой конъюнкцию от трех переменных: сигнала х описывающего состояние объекта Х; и координатных сигналов выбора.
Объект может быть выбран только в том случае, если функция
выбора принимает значение 1.
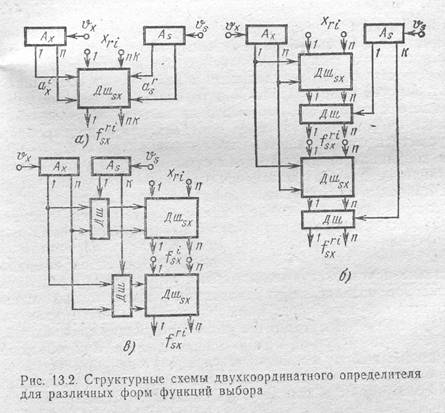
Для построения такого определителя требуются две счетные схемы 4, и А соответственно на k и состояний и дешифратор Дш содержащий N схем типа И, каждая из которых имеет тривхода: х, а (рис. 13.2a).
При разделении N объектов на группы требуется наиболее целесообразное количество групп k и объем кажи группы и.
После преобразования функции выбора объекта может быть получено несколько новых форм записи этой
Схемы, реализующие первые две функции выбора, показа соответственно на рис. 13.2б и в.
Для приведенных форм записи функции (13.11) объем oбopудования двухкоординатного определителя будет одинаковым и с стоимость находится из следующего выражения:

где с и с2 — стоимости соответственно одного элемента счетных схем и одного элемента дешифраторов.
При синтезе определителя следует минимизировать выбора, т. е. отыскивать такую форму ее записи, которая обеспечивала бы минимальный объем оборудования при заданной скорости отыскания обслуживаемых объектов. Минимизацию функции можно проводить в соответствии с рекомендациями, изложенными в [22].
Аналогичным образом можно получить функции выбора ll трем, четырем, пяти и большему числу координат. По этим функциям могут быть синтезированы многокоординатные определителе
Выбор структуры определителя и количество координат зависят от емкости определителя У и требований к параметрам электрического сигнала, формируемого на выходе определителя переходе от однокоординатного определителя к существенно уменьшается объем оборудования. Увеличению числа координат от двух до трех существенного уменьшения оборудования не дает, а увеличение числа координат до четырех и более приводит к увеличению объема оборудования.
В отдельных случаях уменьшение оборудования можно полую чуть за счет использования в двоичных счетных. схемах или многоступенчатых дешифраторов. При этом увеличивается число диодов между выходами элементов памяти схемы и устройствами, которыми управляют определители.
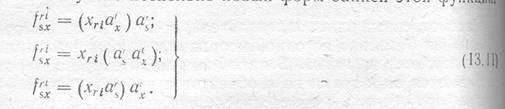
Основное назначение управляющих устройств при тракта передачи через коммутационную систему узла в выборе точек коммутации на соответствующих звеньях соединения. Точки коммутации можно рассматривать, как объекты КС подлежащие выбору со стороны определителей при соединения между входом и выходом данной . Местоположение точки коммутации в соответствующем звене однозначно определяется координатами входа и выхода, связанными с нею (рис. 13.3). Состояние точки коммутации можно определить по состоянию входа и выхода. Поэтому функция выбора точки коммутации будет зависеть от четырех переменных: состояния входа х
 ,
,
состояния выхода у; и координатных сигналов выбора входа а, и выхода а. Для выбора точки коммутации необходимо, чтобы каждая из переменных принимала значение 1.
Следовательно, функцию выбора точки коммутации, например на звене А, можно представить как конъюнкцию этих переменных:

Функция (13.3), описывающая работу определителя точек коммутации звена А, реализуется двумя счетными схемами соответственно на и т состояний и дешифратором емкостью nm выходов. Дешифратор представляет собой совокупность схем типа И на четыре входа. Функцию выбора точки коммутации на основе ассоциативного закона можно привести к виду

Следовательно, функция выбора точки коммутации представляет собой конъюнкцию функций выбора входа f, и выхода f Д, т. е. для выбора точки коммутации при установлении соединения требуется совместная работа двух определителей: определителя входов и определителя выходов, каждый из которых может быть одно или многокоординатным.
Кроме определителей входов и выходов, для выбора точки коммутации необходимо иметь дешифратор емкостью nm выходов, реализующий конъюнкцию функций выбора входа и выхода. Каждый элемент дешифратора представляет собой схему типа И на два входа.
На рис. 13.3 представлена схема выбора точки коммутации в соответствии с функцией (13.14) . Поскольку для образования тракта передачи через КС требуется определять точки на соответствующих звеньях и ступенях искания, то управляют устройство должно содержать определители входов и выходами связанных с точками коммутации на каждом звене. Точка коммутации на соответствующем звене выбирается при совместной раб те этих определителей (рис. 13:4) .
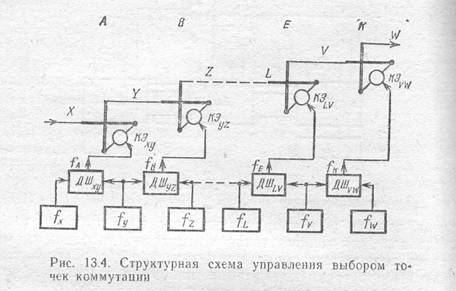
к Изменение состояния определителя обеспечивается сигналами х, характеризующими состояние объектов, и сигналами обратной связи, представляющими собой функции выбора объектов .
Удержание определителя в состоянии выбора объекта обеспечивается входным сигналом х поэтому этот сигнал должен сох» заняться до включения коммутационных элементов. Статические определители выбирают объект или подготавливают его к выбору без каких-либо управляющих сигналов из ПУ или другого ФБ.
На рис. 13.5а и б представлены функциональные схемы стати веского определителя, реализующие соответственно функции
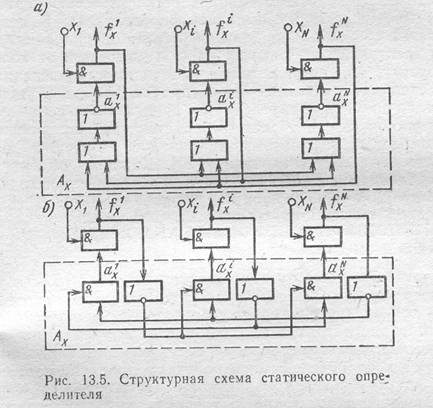
(13.15) и (13.16). Данные определители могут работать только режиме свободного искания.
Однако этот обьем оборудования может быть отнесен только к статическим определителям малой емкости, поскольку в определителях большой ем кости требуется установка усилителей или разделение всех входов на группы с целью обеспечения надежной блокировки входов одновременном поступлении сигнала (x = l) из нескольких оконечных устройств.
Достоинством статических определителей является высокая скорость работы при отыскании объектов с требуемым признаком. Практически скорость ограничивается скоростью переключен элементов, на которых выполнен определитель, К недостаткам относятся сравнительно большой объем оборудования и зависимость электрического режима работы элементов от количестваблокируемых объектов, а также необходимость введения специальных схем для изменения преимущества выбора объектов. Импульсно- временной определитель представляет собой устройство, в котором каждый объект выбирается. при совпадении им пульсов от разных импульсных источников, имеющих разную длительность и частоту следования [20]. Каждому объекту отводится определенная временная позиция, в которой происходит сов падение импульсов, образующих код данного объекта.
Дата добавления: 2016-10-26; просмотров: 2027;
Поиск по сайту
Узнать еще
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- Адаптация и динамические реакции
- АЭРОДИНАМИЧЕСКИЕ ВОЗМУЩЕНИЯ ПОТОКА ВОЗДУХА НА ВХОДЕ В ДВИГАТЕЛЬ И ИХ ВЛИЯНИЕ НА ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ ГТД
- АЭРОДИНАМИЧЕСКИЕ ПЕРЕГРУЗКИ
- Аэродинамические перегрузки
- Аэродинамические силы .
- Аэродинамические силы и моменты.
- Аэродинамические силы летательного аппарата

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
