Средняя квадратическая погрешность линии положения
Для большинства навигационных параметров навигационные изолинии являются кривыми линиями, построение которых на карте вызывает определенную трудность.
В этих случаях навигационная изолиния может быть заменена небольшим по длине отрезком прямой линии, касательным к изолинии вблизи счислимого места судна (рис. 18.6).

Рис. 18.6. Навигационная изолиния и линия положения
Эти прямые линии, которые заменяют навигационные изолинии, называются линиями положения → отрезки прямых линий, касательные к навигационным изолиниям вблизи счислимого места судна.
Замена навигационных изолиний линиями положения позволяет простыми приемами находить обсервованное место судна на карте и производить оценку его точности.
Линия положения (ЛП) характеризуется следующими свойствами (рис. 18.7):
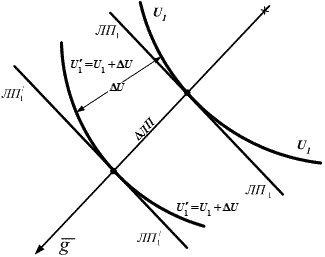
Рис. 18.7. Свойства навигационной линии положения
1. При малом изменении величины навигационного параметра (ΔU) линии положения смещаются параллельно друг другу (ЛП′1  ЛП1).
ЛП1).
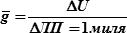
2. Величина параллельного смещения линии положения (ΔЛП) находится в пропорциональной зависимости от величины изменения навигационного параметра (ΔU).
Математически это свойство выражается формулой

| (18.12) |
| где | ΔЛП – линейное смещение линии положения в единицах длины (мили); |
| ΔU – изменение навигационного параметра в его единицах; | |
| g – градиент навигационного параметра (его численное значение). |
Неизбежные случайные погрешности, допускаемые при измерениях навигационных параметров (пеленгов, расстояний и пр.) вызывают погрешность и линии положения.
Рассмотрим, каковы будут эти погрешности в зависимости от значений градиентов (g) и погрешностей измерения навигационного параметра (mU).
Допустим, что в результате измерения какого-то навигационного параметра была получена навигационная изолиния, которая в общем случае выражается как:
| U = f (x, y) | (18.13) |
Заменим вблизи счислимого места навигационную изолинию отрезком прямой ей касательным – линией положения (рис. 18.8).
Пусть при измерении навигационного параметра была допущена случайная погрешность ΔU. В результате этой погрешности линия положения сместится по нормали на некоторое расстояние ΔЛП.
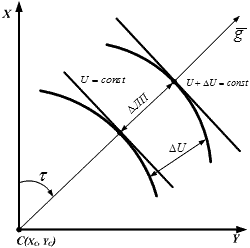
Рис. 18.8. Свойства навигационной линии положения
Величина смещения линии положения в зависимости от погрешности навигационного параметра (ΔU) и его градиента (  ) найдется по формуле (18.12), то есть (2-е свойство линии положения).
) найдется по формуле (18.12), то есть (2-е свойство линии положения).
Градиент навигационного параметра (g) для данной точки – величина постоянная.
Учитывая то, что «…квадрат средней квадратической погрешности функции равен сумме квадратов произведений частных производных функций по каждому аргументу на среднюю квадратическую погрешность соответствующего аргумента…» формула СКП линии положения (mЛП) применительно к изолинии, выражаемой линейным уравнением U = f (x, y), будет иметь вид

| (18.14) |
| где | mЛП – СКП линии положения (мили); |
| mU – СКП измерения навигационного параметра; | |
| g – градиент навигационного параметра. |
Значение градиента навигационного параметра означает: на какую величину нужно ошибиться в получении (измерений) навигационного параметра, чтобы линия положения сместилась точно на одну милю.
| (18.15) |
Если с РЛС мы сняли расстояние до ориентира с ошибкой в 1 милю, значит, и линия положения сместится тоже на 1 милю. Из этого следует, что градиент расстояния равен единице, то есть:
| gD = 1 | (18.16) |
Если до берегового ориентира расстояние D = 1 миля, то для смещения линии положения тоже на 1 милю мы должны снять пеленг на этот ориентир с ошибкой в 1 радиан = 57,3° (если до маяка D = 57,3 мили → ошибка в пеленге = 1°).
Значит, для пеленга:
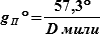
| (18.17) |
Значения градиентов навигационных параметров используемых в судовождении известны и приведены в табл. 5.47 «МТ-2000» (с. 470÷482).
Графически СКП линии положения можно пояснить следующим образом (рис. 18.9).

Рис. 18.9. Среднеквадратическая погрешность линии положения
Если проложить на карте навигационную изолинию или линию положения, то при анализе погрешности определения места следует считать, что судно находится в полосе шириной ±mЛП, а не точно на проведенной линии (ЛП).
Так как mЛП является СКП, то вероятность нахождения судна в полосе ±mЛП равна ≈ 68%.
Можно сказать и так, что «… вероятнейшее значение навигационного параметра (UВ), соответствующее данной линии положения (навигационной изолинии), находится в полосе ±mЛП с вероятностью Р = 0,68».
Пример расчета СКП линии положения (mЛП).
На 2 ориентира измерены визуальные пеленги с СКП – m°П = ±0,8°. Расстояния от обсервованного места судна до ориентиров соответственно равны: D1 = 8,2 мили и D2 = 14,2 мили.
Рассчитать: СКП линий положения (mЛП1 и mЛП2).
Решение.
1. По формуле (18.17)  рассчитываем значения градиента навигационного параметра (пеленга) для обсервованной точки:
рассчитываем значения градиента навигационного параметра (пеленга) для обсервованной точки:
g°П1 = 57,3° / 8,2 мили = 7,0; g°П2 = 57,3° / 14,2 мили = 4,0.
2. По формуле (18.14)  рассчитываем СКП линий положения:
рассчитываем СКП линий положения:

Таким образом, получили значения полуширины полос в пределах которых обсервованное место судна находится с вероятностью ≈ 68% (Р = 0,68).
Дата добавления: 2021-01-26; просмотров: 704;
Поиск по сайту
Узнать еще
- II. Основные положения
- II. Отклонения расположения поверхностей
- III. Суммарные допуски формы расположения
- Абсолютная и относительная погрешность
- Автоматизированные поточные линии диффузии (АПЛ-Д)
- Автоматические и полуавтоматические линии по обработке деталей и изделий
- Автоматические линии
- Аномалии положения мочеточников

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
