Общие принципы построения систем автоматики. Классификация систем РА. Задачи, решаемые системами РА. Фундаментальные принципы управления.
1. Одним из признаков, определяющих общее построение системы, является используемый в ней принцип управления (регулирования). Различают системы с управлением по рассогласованию (ошибке), с управлением по воздействию и системы с комбинированным управлением.
Цель регулирования достигается путём измерения сигнала ошибки регулирования для сведения этой ошибки к нулю. Совокупность правил, описывающих поведение ОУ при нормальном ходе процесса и в статике, называют алгоритмом функционирования.
Алгоритм управления – совокупность правил, описывающих поведение ОУ в динамике и учитывающих все действующие возмущения.
Система автоматического управления (САУ) – техническая система, работа которой происходит без участия оператора. Если в процессе автоматизированного управления системой требуется участие оператора, то такая техническая система называется автоматизированной.
Система автоматического регулирования (САР) – это система, работа которой заключается в поддержании заданного характера выходных координат по определенному алгоритму.
Всякий процесс управления подразумевает наличие некоторого устройства – объекта управления (ОУ), режим работы которого автоматически изменяется в соответствии с сигналом управления  , cформированным в устройстве управления (УУ) по управляющему воздействию
, cформированным в устройстве управления (УУ) по управляющему воздействию  .
.
В зависимости от принципа формирования сигнала управления различают два основных вида систем радиоавтоматики: разомкнутые и замкнутые.
1.1. Функциональная схема разомкнутой системы
На рис. 1.1, изображающем разомкнутую систему, приведены следующие обозначения:
 - помехи, действующие на систему;
- помехи, действующие на систему;
- входное воздействие;
 - управляющее воздействие, представленное аддитивной смесью входного воздействия и помех;
- управляющее воздействие, представленное аддитивной смесью входного воздействия и помех;
УУ- устройство управления,
- cигнал управления;
ОУ – объект управления;
 - возмущающее воздействие, учитывающее влияние внешних факторов;
- возмущающее воздействие, учитывающее влияние внешних факторов;
 - выходной сигнал объекта управления;
- выходной сигнал объекта управления;
Д – датчик, измеряющий выходной сигнал и связанный с объектом управления;
 - ошибки, возникающие из-за измерения;
- ошибки, возникающие из-за измерения;
 - выходной сигнал системы.
- выходной сигнал системы.
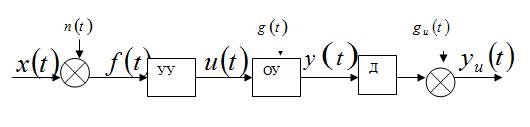
Рис. 1.1. Функциональная схема разомкнутой системы
В данной системе сигнал управления зависит только от управляющего воздействия:
 . (1.1)
. (1.1)
В таких системах радиоавтоматики обеспечивается заранее заданная функциональная связь между управляющим воздействием и выходным сигналом.
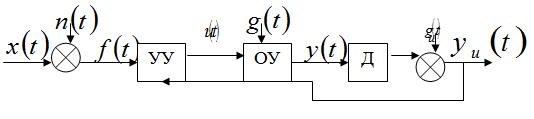
1.2. Функциональная схема замкнутой системы радиоавтоматики
В замкнутых системах или в системах с обратной связью сигнал управления формируется на основании измерения управляющего воздействия и выходного сигнала:
 .
.
 (1.2)
(1.2)
Выражения (1.1) и (1.2) называют алгоритмами или законами управления систем радиоавтоматики.
На рис. 1.2 приведена функциональная схема замкнутой системы радиоавтоматики.
Рис. 1.2. Функциональная схема замкнутой системы радиоавтоматики
За счёт обратной связи влияние на качество работы замкнутых систем радиоавтоматики помех и нестабильности устройств в значительной степени компенсируется.
В радиотехнических устройствах большое распространение получили системы, в которых сигнал управления  формируется по измеренному отклонению выходного сигнала от управляющего воздействия
формируется по измеренному отклонению выходного сигнала от управляющего воздействия  . Функциональная схема такой системы приведена на рис. 1.3.
. Функциональная схема такой системы приведена на рис. 1.3.
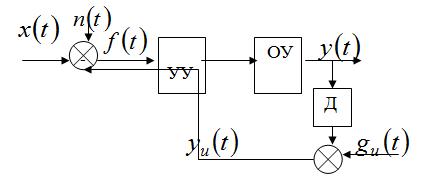
Рис. 1.3. Функциональная схема системы, работающей по принципу рассогласования
Cигнал, поступающий с выхода системы на её вход, называют сигналом обратной связи,  - cигналом рассогласования или сигналом ошибки, устройство, измеряющее
- cигналом рассогласования или сигналом ошибки, устройство, измеряющее  - измерителем рассогласования, который совместно с устройством управления образует регулятор системы радиоавтоматики.
- измерителем рассогласования, который совместно с устройством управления образует регулятор системы радиоавтоматики.
Cистемы радиоавтоматики, построенные подобным образом, называются системами, работающими по принципу отклонения или рассогласования. Одной из разновидностей замкнутых систем является система, работающая по принципу компенсации возмущающих воздействий. Функциональная схема такой системы приведена на рис.1.4.
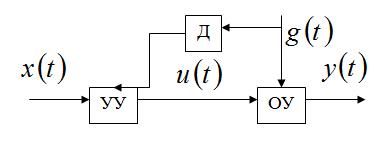
Рис. 1.4. Функциональная схема системы, работающей по принципу компенсации возмущающих воздействий
Возмущающее воздействие измеряется датчиком (Д) и используется для формирования сигнала управления . При выполнении определённых соотношений можно добиться того, чтобы выходной сигнал не зависел от возмущающего воздействия  .
.
Cистемы радиоавтоматики можно классифицировать также по характеру задающего воздействия, выделяя при этом системы стабилизации, программного управления и следящие системы. В системах стабилизации задающее воздействие описывается постоянной величиной. В системах программного управления задающее воздействие описывается детерминированной функцией времени. Методы анализа следящих систем полностью применимы к системам стабилизации и программного управления.
Дата добавления: 2020-10-25; просмотров: 803;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- B. Департаменты и управления функционального характера.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- F84 Общие расстройства развития

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
