Проектирование систем радиоавтоматики
7.1. Постановка задачи
Задачей проектирования является определение структуры, методов реализации, технических параметров и характеристик на основе заданных требований с учетом назначения и условий функционирования системы.
Существуют различные подходы к проектированию. Если известны характеристики задающего и возмущающего воздействий (корреляционная функция или спектральная плотность), то задачей проектирования является определение структуры системы, при которой минимален средний квадрат ошибки.
В качестве математического аппарата используются интегральные уравнения Винера-Хопфа и уравнения Калмана.
Эта теория носит название оптимальной линейной фильтрации.
В иной постановке задачей синтеза может быть обеспечение минимума функционала качества:
 ,
,
где  ─ квадратичная форма относительно сигнала ошибки
─ квадратичная форма относительно сигнала ошибки  ;
;
 ─ квадратичная форма относительно сигнала управления; Т – время работы системы;
─ квадратичная форма относительно сигнала управления; Т – время работы системы;  - коэффициенты.
- коэффициенты.
Задача синтеза: выбрать и технически реализовать сигнал управления, который обеспечивает перевод системы из начального состояния в конечное и минимизирует функционал качества.
Для решения этой задачи используются методы вариационного исчисления, метод динамического программирования. Вследствие своей сложности математический аппарат мало пригоден для решения инженерных задач проектирования. Этот аппарат используется в основном в научных целях с целью определения потенциально возможных характеристик системы.
Синтез систем из условия обеспечения показателей качества называют динамическим синтезом.
При проектировании системы целесообразно получать более простую реализацию. Для оптимизации по этому критерию может быть использован функционал сложности
 ,
,
где  – порядок астатизма;
– порядок астатизма;  - частотная передаточная функция.
- частотная передаточная функция.
При проектировании системы кроме названных характеристик учитываются требования надежности, габаритов, веса, стабильности характеристик в условиях изменения температуры, влажности, давления и т.д.
7.2. Определение желаемой ПФ разомкнутой системы
При динамическом синтезе по известным характеристикам управляющих и возмущающих воздействий задаются в виде системы неравенств показатели качества: допустимые величины составляющих ошибки, полоса пропускания, колебательность.
Первым этапом решения задачи синтеза является определение желаемой передаточной функции.
Типовые передаточные функции разомкнутой системы имеют вид:
При нулевом порядке астатизма
 ; (7.1)
; (7.1)
 ; (7.2)
; (7.2)
Множители  в передаточных функциях (7.1) и (7.2)
в передаточных функциях (7.1) и (7.2)  характеризуют звенья с малыми постоянными времени.
характеризуют звенья с малыми постоянными времени.
Системы с первым порядком астатизма
 ;
;
 .
.
Системы со вторым порядком астатизма
 .
.
Типичная ЛАЧХ, соответствующая желаемым передаточным функциям, изображена на рис. 7.1. На характеристике различают три диапазона частот:
(1) – диапазон НЧ;
(2) – диапазон СЧ;
(3) – диапазон ВЧ.
Параметры ЛАЧХ:
- в диапазоне НЧ характеризуют точность системы;
- в диапазоне СЧ ─ устойчивость системы и запас устойчивости по фазе,
полосу пропускания, показатели качества переходного процесса;
- в диапазоне ВЧ ─ запас устойчивости.
После определения вида желаемой передаточной функции необходимо определить ее параметры  и постоянные времени
и постоянные времени  .
.
Рассмотрим метод определения параметров желаемой ПФ на примере системы с астатизмом первого порядка, имеющей передаточную функцию следующего вида:
 .
.
Если заданы ошибки по положению, скорости и ускорению, можно определить коэффициенты:
 ;
;  - скоростная ошибка;
- скоростная ошибка;
 - ошибка по ускорению;
- ошибка по ускорению;
 ─ коэффициент усиления разомкнутой системы.
─ коэффициент усиления разомкнутой системы.
Определим 

 . Для этого используется ЛАЧХ разомкнутой системы (рис. 7.1).
. Для этого используется ЛАЧХ разомкнутой системы (рис. 7.1).
Определим связь между  ,
,  ,
,  и
и  .
.

Рис.7.1. ЛАЧХ разомкнутой системы
Определим . Для этого используется ЛАЧХ разомкнутой системы, определим связь между  ,
,  ,
,  и
и  .
.
Составим уравнение для третьей асимптоты

Величина усиления на частоте среза  равна
равна
 . (7.3)
. (7.3)
Из (7.3 ) следует,что
 .
.
Постоянные времени  и
и  определяются из выражения для коэффициента ошибки по ускорению:
определяются из выражения для коэффициента ошибки по ускорению:
 (7.4)
(7.4)
Из (7.3) и (7.4) находим
 ;
; 
Запас устойчивости по фазе определяется исходя из заданного значения колебательности М:
 .
.
Частота  определяется исходя из заданного значения полосы пропускания
определяется исходя из заданного значения полосы пропускания 
 ;
;
определяется с помощью выражения:
 ;
;
Аналогично определяются параметры и других желаемых передаточных функций.
7.3. Методы коррекции передаточных функций
Коррекция систем осуществляется с целью обеспечения необходимого запаса устойчивости и параметров переходных процессов, а также полосы пропускания системы.
Коррекция ПФ осуществляется путем включения корректирующих звеньев. В принципе обеспечение необходимого запаса устойчивости может быть получено уменьшением , при этом частота среза разомкнутой системы уменьшается, а  не изменяется. Но в этом случае ухудшается точность и это не всегда приемлемо.
не изменяется. Но в этом случае ухудшается точность и это не всегда приемлемо.
Корректирующие звенья необходимы в случае, если система имеет астатизм второго или более высокого порядка, так как два интегрирующих звена производят сдвиг фазы на 180ºи система является структурно неустойчивой.
Коррекция систем производится в цепях переменного и постоянного тока включением корректирующих звеньев, в качестве которых используются RC – цепи, тахогенераторы и трансформаторы.
Различают последовательное и параллельное включение корректирующих звеньев.
Последовательное включение производится последовательно с корректируемыми звеньями, параллельное – в цепь обратной связи, охватывающей всю систему или часть звеньев.
По типу используемой обратной связи различают системы с жесткой обратной связью и с гибкой обратной связью.
При жесткой обратной связи на вход корректирующего звена подается выходная величина; при этом ПФ обратной связи
 .
.
При гибкой обратной связи на вход подается производная выходной величины
 .
.
Передаточная функция системы, включающей последовательные корректирующие звенья
 . (7.5)
. (7.5)
Передаточная функция системы с параллельными корректирующими звеньями
 . (7.6)
. (7.6)
Чтобы определить связь между последовательными и параллельными корректирующими звеньями, надо приравнять передаточные функции (7.5) и (7.6) систем. Учитывая, что
 ,
,
в результате получим:
 ;
;
 ; (7.7)
; (7.7)
 . (7.8)
. (7.8)
На основании уравнений (7.7) и (7.8) можно сделать следующие выводы.
1. Последовательные и параллельные корректирующие звенья оказывают качественно противоположное воздействие на ПФ корректируемого звена;
2. Тип ПФ параллельного корректирующего звена, эквивалентного по воздействию последовательному звену, зависит от ПФ охватываемого звена;
3. Параллельное корректирующее звено уменьшает ошибки, связанные с нестабильностью параметров охватываемых звеньев, тогда как нестабильность последовательного корректирующего звена полностью входит в нестабильность системы. С этой точки зрения использование параллельных корректирующих звеньев предпочтительнее.
7.4. Типы параллельных и последовательных корректирующих звеньев
Наиболее широко распространены корректирующие звенья в виде RC-цепей.
В качестве последовательных корректирующих звеньев используется звено с опережением по фазе (рис. 7.2) звено с отставанием по фазе (рис. 7.4) и интегро-дифференцирующее звено (рис. 7.6), обеспечивающее опережение по фазе в одном диапазоне частот и отставание – в другом.

Рис.7.2. Схема звена с опережением по фазе
Характеристики звена с опережением по фазе:
 ;
;  ;
;  ;
;
 ;
;  ;
;
 ;
;
Логарифмические АЧХ и ФЧХ изображены на рис. 7.3.
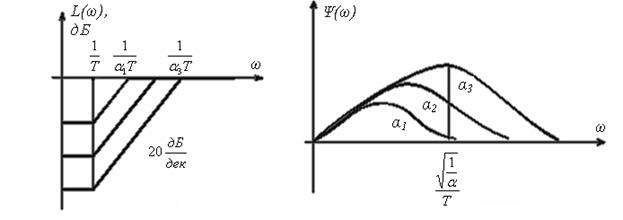
Рис.7.3. Логарифмические характеристики звена с опережением по фазе
Звено используется для расширения полосы пропускания следящей системы. Максимальный фазовый сдвиг
на частоте
 .
.
Звено с отставанием по фазе (пропорционально-интегрирующее звено):
Рис. 7.4. Схема звена с отставанием по фазе
Характеристики звена:
 ; ;
; ;  ;
; 
 ;
;
 ;
; 
Логарифмические характеристики звена приведены на рис. 7.5.
Звено обеспечивает отрицательный фазовый сдвиг на всех частотах, кроме
0 и  . Максимальный фазовый сдвиг равен
. Максимальный фазовый сдвиг равен
на частоте
 .
.
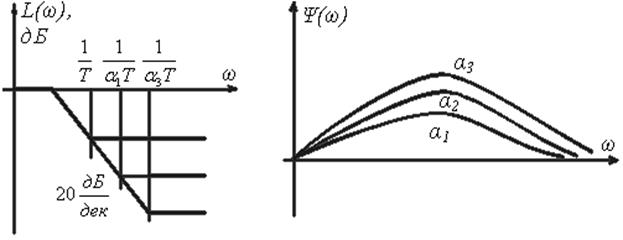
Рис. 7.5. Логарифмические характеристики звена с отставанием по фазе
Комбинированное (интегро-дифференцирующее) звено:

Рис.7.6. Схема и логарифмические характеристики комбинированного звена
Передаточная функция звена:
 ,
,
где  ;
;  ;
;  ;
;  ;
;
 .
.
Рассмотрим влияние жесткой и гибкой обратных связей на параметры охватываемых звеньев.
Охватим жесткой обратной связью апериодическое звено (рис.7.7).
Рис. 7.7. Схема апериодического звена, охваченного жесткой обратной связью
Определим передаточную функцию звена:
 ;
;  ;
;  . (7.8)
. (7.8)
Как следует из (7.8), характер звена не изменился, но коэффициент усиления уменьшился в  раз, и во столько же раз уменьшилась постоянная времени. Такой же эффект имеет место, если последовательно с апериодическим звеном включить звено, обеспечивающее опережение по фазе (рис.7.8).
раз, и во столько же раз уменьшилась постоянная времени. Такой же эффект имеет место, если последовательно с апериодическим звеном включить звено, обеспечивающее опережение по фазе (рис.7.8).
Рис.7.8. Эквивалентная схема с последовательно включенных звеном с опережением по фазе
Здесь  .
.
Охватим жесткой обратной связью идеальное интегрирующее звено (рис. 7.9).
Рис.7.9. Схема идеального интегрирующего звена, охваченного жесткой обратной связью
 ;
;  ;
;  , (7.9)
, (7.9)
где  .
.
Эквивалентная схема с последовательно включенным инерционным дифференцирующим звеном, обеспечивающим расширение полосы и опережение по фазе, приведена на рис. 7.10.

Рис. 7.10. Эквивалентная схема с последовательно включенным инерционным дифференцирующим звеном
Здесь  .
.
Эти два примера показывают, что использование жесткой обратной связи приводит к расширению полосы пропускания следящей системы и одновременному снижению коэффициента усиления системы, что является недостатком жесткой обратной связи.
При гибкой обратной связи на вход охватываемого звена подается производная входного воздействия. В качестве звеньев в цепях обратной связи используются тахогенераторы, RC – цепи, трансформаторы.
Охватим электродвигатель гибкой обратной связью (рис. 7.11).
В цепь обратной связи включен тахогенератор (идеальное дифференцирующее звено). Передаточная функция тахогенератора W(jw) = kтг(jw).

Рис. 7.11. Схема электродвигателя, охваченного гибкой обратной связью
Частотная передаточная функция:
 .
.
Следовательно, при охвате электродвигателя гибкой обратной связью уменьшается коэффициент усиления  и электромеханическая постоянная
и электромеханическая постоянная  в (
в (  ) раз. Такой же эффект имеет место при охвате инерционного звена жесткой обратной связью.
) раз. Такой же эффект имеет место при охвате инерционного звена жесткой обратной связью.
Охватим гибкой обратной связью безынерционное звено (рис. 7.12) В цепи ОС включено инерционное дифференцирующее звено.
Рис. 7.12. Схема безынерционного звена, охваченного обратной связью
Определим передаточную функцию:
 ,
,
Такое включение эквивалентно последовательному включению с апериодическим звеном, звена обеспечивающего запаздывание по фазе (рис.7.13).
Здесь
 ;
;  ;
;

Рис.7.13. Эквивалентная схема с последовательно включенным звеном с отставанием по фазе
Включение инерционного дифференцирующего звена последовательно обеспечивает расширение полосы. Включение этого же звена в цепь обратной связи проводит к качественно противоположному эффекту.
Охватим безынерционное звено обратной связью, посредством апериодического звена первого порядка (рис. 7.14)
Рис.7.15. Схема безынерционного звена, охваченного обратной связью
 ;
;
 .
.
Эквивалентная схема с последовательно включенным корректирующим звеном приведена на рис. 7.16.
Здесь
 ;
;  ;
;

Рис.7.16. Эквивалентная схема с последовательно включенным корректирующим звеном
Апериодическое звено первого порядка, включенное последовательно обеспечивает сужение полосы и дополнительное запаздывание фазы. Это же звено, включенное в цепь ОС, обеспечивает расширение полосы и положительный сдвиг фазы.
Дата добавления: 2020-10-25; просмотров: 768;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
