Дискретно – детерминированные модели (F-схемы)
ДДМ являются предметом рассмотрения теории автоматов (ТА). ТА - раздел теоретической кибернетики, изучающей устройства, перерабатывающие дискретную информацию и меняющего свои внутренние состояния лишь в допустимые моменты времени.
Конечный автомат имеет множество внутренних состояний и входных сигналов, являющихся конечными множествами. Автомат задаётся F- схемой: F=<z,x,y,j,y,z0>, (1)
где z,x,y - соответственно конечные множества входных, выходных сигналов (алфавитов) и конечное множество внутренних состояний (алфавита). z0ÎZ - начальное состояние; j(z,x) - функция переходов; y(z,x) - функция выхода. Автомат функционирует в дискретном автоматном времени, моментами которого являются такты, т.е. примыкающие друг к другу равные интервалы времени, каждому из которых соответствуют постоянные значения входного, выходного сигнала и внутреннего состояния. Абстрактный автомат имеет один входной и один выходной каналы.
В момент t, будучи в состоянии z(t), автомат способен воспринять сигнал x(t) и выдать сигнал y(t)=y[z(t),x(t)], переходя в состояние z(t+1)=j[z(t),z(t)], z(t)ÎZ; y(t)ÎY; x(t)ÎX. Абстрактный КА в начальном состоянии z0 принимая сигналы x(0), x(1), x(2) … выдаёт сигналы y(0), y(1), y(2)… (выходное слово).
Существуют F- автомат 1-ого рода (Миля), функционирующий по схеме:
z(t+1)= j[z(t),z(t)], t=0,1,2… (1)
y(t)=y[z(t),x(t)], t=0,1,2… (2)
F- автомат 2-ого рода:
z(t+1)= j[z(t),z(t)], t=0,1,2… (3)
y(t)=y[z(t),x(t-1)], t=1,2,3… (4)
Автомат 2-ого рода, для которого y(t)=y[z(t)], t=0,1,2,… (5)
т.е. функция выходов не зависит от входной переменной x(t), называется автоматом Мура.
Т.о. уравнения 1-5 полностью задающие F- автомат, являются частным случаем уравнения
 (6)
(6)
где  - вектор состояния,
- вектор состояния,  - вектор независимых входных переменных,
- вектор независимых входных переменных,  - вектор воздействий внешней среды,
- вектор воздействий внешней среды,  - вектор собственных внутренних параметров системы,
- вектор собственных внутренних параметров системы,  - вектор начального состояния, t - время; и уравнение
- вектор начального состояния, t - время; и уравнение  , (7)
, (7)
когда система S - денорминированная и на её вход поступает дискретный сигнал x.
По числу состояний конечные автоматы бывают с памятью и без памяти. Автоматы с памятью имеют более одного состояния, а автоматы без памяти (комбинационные или логические схемы) обладают лишь одним состоянием. При этом согласно (2), работа комбинационной схемы заключается в том, что она ставит в соответствие каждому входному сигналу x(t) определённый выходной сигнал y(t), т.е. реализует логическую функцию вида:
y(t)=y[x(t)], t=0,1,2,…
Эта функция называется булевой, если алфавиты X и Y, которым принадлежат значения сигналов x и y состоят из 2-х букв.
По характеру отсчёта времени (дискретному) F- автоматы делятся на синхронные и асинхронные. В синхронных автоматах моменты времени, в которые автомат "считывает" входные сигналы, определяются принудительно синхронизирующими сигналами. Реакция автомата на каждое значение входного сигнала заканчивается за один такт синхронизации. Асинхронный F- автомат считывает входной сигнал непрерывно и поэтому, реагируя на достаточно длинный водной сигнал постоянной величины x, он может, как это следует из 1-5, несколько раз изменить своё состояние, выдавая соответствующее число выходных сигналов, пока не перейдёт в устойчивое.
Для задания F- автомата необходимо описать все элементы множества F=<z,x,y,j,y,z0>, т.е. входной, внутренний и выходной алфавиты, а также функции переходов и выходов. Для задания работы F- автоматов наиболее часто используются табличный, графический и матричный способ.
В табличном способе задания используется таблицы переходов и выходов, строки которых соответствуют входным сигналам автомата, а столбцы - его состояниям. При этом обычно 1-ый столбец слева соответствует начальному состоянию z0. На пересечении i-ой строки и j-ого столбца таблицы переходов помещается соответствующее значение j(zk,xi) функции переходов, а в таблице выходов - y(zk, xi) функции выходов. Для F- автомата Мура обе таблицы можно совместить, получив т.н. отмеченную таблицу переходов, в которой над каждым состоянием zk автомата, обозначающим столбец таблицы, стоит соответствующий этому состоянию, согласно (5), выходной сигнал y(zi).
Описание работы F- автомата Мили таблицами переходов j и выходов y иллюстрируется таблицей (1), а описание F- автомата Мура - таблицей переходов (2).
Таблица 1
| xj | zk | |||
| z0 | z1 | … | zk | |
| Переходы | ||||
| x1 | j(z0,x1) | j(z1,x1) | … | j(zk,x1) |
| x2 | j(z0,x2) | j(z1,x2) | … | j(zk,x2) |
| ………………………………………………………… | ||||
| xl | … | … | … | … |
| Выходы | ||||
| x1 | y(z0,x1) | y(z1,x1) | … | y(zk,x1) |
| ………………………………………………………… | ||||
| xl | y(z0,xl) | y(z1,xl) | … | y(zk,xl) |
Таблица 2
| y(zk) | |||||||
| xi | y(z0) | y(z1) | … | y(zk) | |||
| z0 | z1 | … | zk | ||||
| x1 | j(z0,x1) | j(z1,x1) | … | j(zk,x1) | |||
| x2 | j(z0,x2) | j(z1,x2) | … | j(zk,x2) | |||
| ………………………………………………………… | |||||||
| xl | j(z0,xl) | j(z1,xl) | … | j(zk,xl) | |||
Примеры табличного способа задания F- автомата Мили F1 с тремя состояниями, двумя входными и двумя выходными сигналами приведены в таблице 3, а для F- автомата Мура F2 - в таблице 4.
Таблица 3
| xj | z0 | ||
| z0 | z1 | z2 | |
| Переходы | |||
| x1 | z2 | z0 | z0 |
| x2 | z0 | z2 | z1 |
| Выходы | |||
| x1 | y1 | y1 | y2 |
| x2 | y1 | y2 | y1 |
Таблица 4
| y | |||||
| xi | y1 | y1 | y3 | y2 | y3 |
| z0 | z1 | z2 | z3 | z4 | |
| x1 | z1 | z4 | z4 | z2 | z2 |
| x2 | z3 | z1 | z1 | z0 | z0 |
При другом способе задания конечного автомата используется понятие направленного графа. Граф автомата представляет собой набор вершин, соответствующих различным состояниям автомата и соединяющих вершин дуг графа, соответствующих тем или иным переходам автомата. Если входной сигнал xk вызывает переход из состояния zi в состояние zj, то на графе автомата дуга, соединяющая вершину zi с вершиной zj обозначается xk. Для того, чтобы задать функцию переходов, дуги графа необходимо отметить соответствующими выходными сигналами. Для автоматов Мили эта разметка производиться так: если входной сигнал xk действует на состояние zi, то согласно сказанному получается дуга, исходящая из zi и помеченная xk; эту дугу дополнительно отмечают выходным сигналом y=y(zi, xk). Для автомата Мура аналогичная разметка графа такова: если входной сигнал xk, действуя на некоторое состояние автомата, вызывает переход в состояние zj, то дугу, направленную в zj и помеченную xk, дополнительно отмечают выходным сигналом y=y(zj, xk). На рис. 1 приведены заданные ранее таблицами F- автоматы Мили F1 и Мура F2 соответственно.
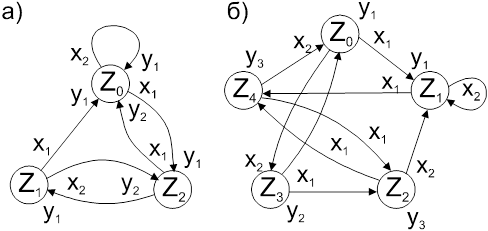
Рис. 1. Графы автоматов Мили (а) и Мура (б).
При решении задач моделирования часто более удобной формой является матричное задание конечного автомата. При этом матрица соединений автомата есть квадратная матрица С=|| cij ||, строки которой соответствуют исходным состояниям, а столбцы - состояниям перехода. Элемент cij=xk/yS в случае автомата Мили соответствует входному сигналу xk, вызывающему переход из состояния zi в состояние zj и выходному сигналу yS, выдаваемому при этом переходе. Для автомата Мили F1, рассмотренного выше, матрица соединений имеет вид:
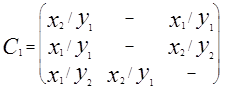
Если переход из состояния zi в состояние zj происходит под действием нескольких сигналов, элемент матрицы cij представляет собой множество пар "вход/выход" для этого перехода, соединённых знаком дизъюнкции.
Для F- автомата Мура элемент cij равен множеству входных сигналов на переходе (zizj), а выход описывается вектором выходов:
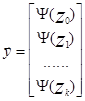 i-ая компонента которого выходной сигнал, отмечающий состояние zi
i-ая компонента которого выходной сигнал, отмечающий состояние zi
Пример. Для рассмотренного ранее автомата Мура F2 запишем матрицу состояний и вектор выходов:
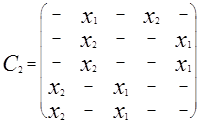 ;
; 
Для детерминированных автоматов переходы однозначны. Применительно к графическому способу задания F- автомата это означает, что в графе F- автомата из любой вершины не могут выходить 2 и более ребра, отмеченные одним и тем же входным сигналом. Аналогично этому в матрице соединений автомата С в каждой строке любой входной сигнал не должен встречаться более одного раза.
Рассмотрим вид таблицы переходов и графа асинхронного конечного автомата. Для F- автомата состояние zk называется устойчивым, если для любого входа xiÎX, для которого j(zk,xi)=zk имеет место y(zkxi)=yk. Т.о. F- автомат называется асинхронным, если каждое его состояние zkÎZ устойчиво.
На практике всегда автоматы являются асинхронными, а устойчивость их состояний обеспечивается тем или иным способом, например, введением сигналов синхронизации. На уровне абстрактной теории удобно часто оперировать с синхронными конечными автоматами.
Пример. Рассмотрим асинхронный F- автомат Мура, который описан в табл. 5 и приведён на рис. 2.
Таблица 5
| y | |||
| xi | y1 | y2 | y3 |
| z0 | z1 | z2 | |
| x1 | z1 | z1 | z1 |
| x2 | z2 | z1 | z2 |
| x3 | z0 | z0 | z2 |
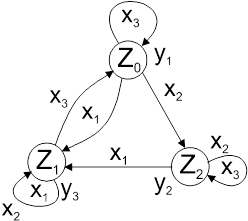
Рис. 2.Граф асинхронного автомата Мура.
Если в таблице переходов асинхронного автомата некоторое состояние zk стоит на пересечении строки xS и столбца zS(S¹k), то это состояние zk обязательно должно встретиться в этой же строке в столбце zk.
С помощью F-схем описываются узлы и элементы ЭВМ, устройства контроля, регулирования и управления, системы временной и пространственной коммутации в технике обмена информацией. Широта применения F-схем не означает их универсальность. Этот подход непригоден для описания процессов принятия решений, процессов в динамических системах с наличием переходных процессов и стохастических элементов.
Дата добавления: 2019-02-08; просмотров: 895;
Поиск по сайту
Узнать еще
- А. Возникновение и эволюция глобального моделирования
- А. Классификация видов моделирования (Л.5)
- Адаптивное управление по заданной модели
- Алгоритм моделирования по принципу особых состояний.
- Алгоритм моделирования процесса управления комплексной информатизацией образовательных систем на основе функционального подхода
- Алгоритм моделирования системы электропривода по методу структурных схем
- Алгоритм моделирования системы электропривода по методу уравнений состояния
- Амплитудные и декрементные интерпретационные модели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
