Усталений режим. Нерівномірність руху механізму
Усталеним рухом називається такий рух, при якому швидкість початкової ланки (узагальнена швидкість) є періодичною функцією часу. На рис. 4.2 показано для усталеного руху приклад залежності швидкості руху початкової ланки механізму від часу t. Як бачимо, кутова швидкість періодично коливається відносно деякого постійного середнього значення.
Нерівномірність ходу машини є наслідком двох факторів: зміни упродовж циклу миттєвих значень зведених моментів рушійних сил і сил опору; періодичної зміни зведеного моменту інерції механізму.
Нерівномірність обертання оцінюється коефіцієнтом нерівномірності
 ,
,
де  - відповідно максимальна, мінімальна та середня за цикл швидкість.
- відповідно максимальна, мінімальна та середня за цикл швидкість.
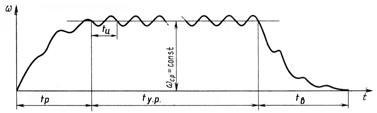
Рис. 4.2.
Величина  рахується за формулою
рахується за формулою  , у якій n – частота обертання початкової ланки.
, у якій n – частота обертання початкової ланки.
Коефіцієнт нерівномірності характеризує розмах коливань швидкості по відношенню до її середнього значення. Очевидно, що чим менше  , тим рівномірніше рухається початкова ланка.
, тим рівномірніше рухається початкова ланка.
Для кожного виду машин є своя допустима величина коефіцієнта нерівномірності  , встановлена практикою. Значення допустимих коефіцієнтів нерівномірності руху наведено у технічних довідниках; так для помпи 1/5-1/30; для металообробних верстатів 1/20-1/50, для ДВЗ 1/80-1/100, для електричних генераторів змінного струму 1/200-1/300, для авіаційних двигунів та турбогенераторів 1/200 і менше.
, встановлена практикою. Значення допустимих коефіцієнтів нерівномірності руху наведено у технічних довідниках; так для помпи 1/5-1/30; для металообробних верстатів 1/20-1/50, для ДВЗ 1/80-1/100, для електричних генераторів змінного струму 1/200-1/300, для авіаційних двигунів та турбогенераторів 1/200 і менше.
Коефіцієнт нерівномірності є величина досить мала, що дозволяє прийняти середню величину кутової швидкості рівного середньому арифметичному з її максимального і мінімального значень.
Звичайно, при проектуванні механізму задаються наперед бажаними для механізму значеннями коефіцієнта нерівномірності руху та середньої швидкості обертання головного вала.
В усталеному режимі працюють дуже багато машин. Найкращі умови для роботи таких машин – абсолютно рівномірне обертання їх головного вала. Як відомо, у загальному випадку швидкість початкової ланки механізму при усталеному русі є змінною величиною. Коливання швидкості початкової ланки за час усталеного руху бувають двох різних типів: періодичні та неперіодичні.
Періодичними коливаннями швидкостей машини називаються коливання, при яких швидкості всіх ланок машини в усіх їхніх положеннях мають цілком певні цикли, після закінчення яких ці швидкості набувають щоразу своїх початкових значень.
Неперіодичні коливання швидкостей залежать від різних причин: раптової зміни корисних або шкідливих опорів, включення в машину додаткових мас і т.п. Раптова зміна навантаження на машину спричиняє раптове збільшення або зменшення швидкості головного вала машини і, оскільки ці коливання не мають певного циклу, то вони називаються неперіодичними. У більшості машин спостерігаються обидва види коливань швидкості.
Коливання швидкості обох типів небажані як з точки зору динаміки машини, так і виконання нею технологічного процесу. Коливання швидкості спричиняють у кінематичних парах додаткові динамічні тиски, що знижують ККД машини, довговічність та надійність її роботи.
Оскільки коливання швидкості повністю усунути неможливо, необхідно по можливості їх зменшити.
Задача про регулювання швидкостей під час усталеного руху машини або механізму має суттєве практичне значення в техніці, оскільки в більшості машин цей час є робочим часом її руху, тобто проміжком часу, протягом якого машина долає виробничі опори.
Розглянемо шляхи розв’язування цієї задачі. Маса є мірою інертності тіла. Всі ланки механізму мають інертність. Ця властивість полягає в тому, що чим інертніше матеріальне тіло, тим повільніше проходить зміна його швидкості, яка викликана дією прикладених до нього сил. Таким чином, щоб отримати обертання головного вала з нерівномірністю, що не перевищує заданої величини, інертність цього вала з усіма зв’язаними з ним деталями необхідно зробити достатньо великою. Практично, це збільшення інертності досягається посадкою на один із валів машини додаткової деталі, що має певний момент інерції. Ця деталь має назву маховик (колесо з великим моментом інерції). Підбираючи момент інерції маховика, можна забезпечити обертання головного вала машини із заданим коефіцієнтом нерівномірності.
Дія маховика полягає у тому, що при перевищені роботи  над роботою
над роботою  маховик приймає на себе надлишок кінетичної енергії механізму і, завдяки своєму великому моменту інерції, не дає швидкості надмірно зростати; коли ж робота
маховик приймає на себе надлишок кінетичної енергії механізму і, завдяки своєму великому моменту інерції, не дає швидкості надмірно зростати; коли ж робота  , маховик віддає накопичену кінетичну енергію, протидіючи зменшенню швидкості.
, маховик віддає накопичену кінетичну енергію, протидіючи зменшенню швидкості.
Маховик є ніби акумулятором кінетичної енергії машини. Таким чином, основне призначення маховика є обмеження коливань кутової швидкості в межах, що встановлені величиною коефіцієнта нерівномірності .
Акумулююча здатність маховика використовується не лише для забезпечення допустимої нерівномірності ходу машини. В деяких машинах (у яких корисне навантаження періодично змінюється в значних межах) махових дозволяє використовувати накопичену енергію для подолання підвищених корисних навантажень без збільшення потужності двигуна. Маховик неодмінно застосовується в машинах ударної дії – молотах, прокатних станах, дробарках і т. ін., допомагаючи електродвигуну при пікових навантаженнях. В автомобілях маховик сприяє рушати машині з місця.
Регулювання періодичних коливань швидкості здійснюється за допомогою маховика, що виконаний, як правило, у вигляді колеса з розвинутим ободом (з великим моментом інерції).
Регулювання неперіодичних коливань за допомогою маховика можливо здійснити, якщо вони незначні. При значних неперіодичних коливаннях встановлюють механізми, що називаються регуляторами – які регулюють закони зміни рушійних сил або сил опору.
Дата добавления: 2016-07-22; просмотров: 1795;
Поиск по сайту
Узнать еще
- II. Тоталитарный политический режим.
- III. Авторитарный политический режим.
- Аналіз руху та ефективності формування грошових потоків
- Визначення закону руху механізму
- ВИЗНАЧЕННЯ ЗВЕДЕНОГО МОМЕНТУ ІНЕРЦІЇ МЕХАНІЗМУ.
- Визначення основних розмірів кулачкового механізму
- ВИЗНАЧЕННЯ ПОЛОЖЕНЬ ЛАНОК ГРУП І ПОБУДОВА ТРАЄКТОРІЙ, ОПИСУВАНИХ ТОЧКАМИ ЛАНОК МЕХАНІЗМУ.
- Вывод скважин оборудованных УШГН на режим.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
