ВИЗНАЧЕННЯ ПОЛОЖЕНЬ ЛАНОК ГРУП І ПОБУДОВА ТРАЄКТОРІЙ, ОПИСУВАНИХ ТОЧКАМИ ЛАНОК МЕХАНІЗМУ.
Для вирішення задачі про положення ланок механізму (плану механізму) повинні бути задана кінематична схема механізму (КСМ) і функція переміщень початкової ланки (для w=1) чи функції переміщень початкових ланок для механізмів з декількома ступенями вільності.
Для визначення положень ланок механізму у визначеному масштабі будують його КСМ (план механізму).
Розглянемо графічний метод на прикладі шестиланкового важільного механізму маніпулятора подачі заготовок (рис.3). Ланка 1 (кривошип) обертається з постійною кутовою швидкістю ω. При побудові плану механізму кут повороту ланки 1, що є узагальненою координатою, розділимо на ряд послідовних кутових кроків, рівних між собою (наприклад, на 12 кутових кроків, кожний з який дорівнює 30˚ ).
За нульове положення ланки 1 виберемо його положення відповідне крайньому лівому положенню вихідної ланки 5 (повзун). При цьому ланка 1 і ланка 2 (шатун) повинні бути розташовані на одній прямій(точка A праворуч від точки O1 ).
 |
Точка А описує коло радіусу О1А , послідовні положення якої відзначені арабськими цифрами 1, 2, 3,..., 12. Для визначення положень ланок 2 і 3 досить знайти положення кінематичної пари В, шарнірно з'єднуючі ці ланки між собою.
Точка В описує дугову траєкторію радіуса А2В В в її відносному русі навколо точки О2 і дугову траєкторію радіуса BА в її русі відносноточки А. Точка перетину цих двох дугових траєкторій знаходиться задопомогою циркуля. Подібну побудову називають способом засічок.
Для інших положень вхідної ланки 1 виконують аналогічні побудови і знаходять послідовні положення точки В на колі радіусу О2В, що розташовані нерівномірно.
Для визначення положень ланок 4 і 5 досить знайти положення точки D. Траєкторією точки D відносно стояка 6 є пряма x - x, а траєкторією цієї ж точки відносно точки C ланки 3 є дуга радіуса CD. Точка перетинання цих двох траєкторій і визначає для кожного положення точку D.
На плані механізму в разі потреби можна побудувати траєкторії, описувані будь-якою точкою тієї чи іншої ланки, положення якої вже знайдено, наприклад точки S4 центра мас ланки 4. Подібні траєкторії точок, розташованих на ланках, що здійснюють плоскопаралельний рух, називають шатунними кривими.
6.5. ПОБУДОВА ДІАГРАМ ПЕРЕМІЩЕННЯ
При дослідженні механізмів часто недостатньо знати лише форму шляху – траєкторію руху точки; потрібно ще знати характер зміни довжини пройденого шляху залежно від часу чи кута повороту кривошипа (узагальненої координати). Для цього будують діаграми лінійних s=s(t), або кутових β=β(t) переміщень.
Розглянемо побудову діаграми переміщень повзуна Вдля кривошипно-повзункового механізму (рис. 4).
 |
 За умови рівномірного обертання початкової ланки (ω1=const) через рівні проміжки часу кривошип повертатиметься на однакові кути, а переміщення повзуна будуть вимірюватись відрізками В0В1, В0В2 . . . і т.д., Далі будують прямокутну систему координат S – t: по осі ординат – переміщення S , по осі абсцис – час t. На осі абсцисвідкладають відрізок l = (0 - 0), який зображує у масштабі
За умови рівномірного обертання початкової ланки (ω1=const) через рівні проміжки часу кривошип повертатиметься на однакові кути, а переміщення повзуна будуть вимірюватись відрізками В0В1, В0В2 . . . і т.д., Далі будують прямокутну систему координат S – t: по осі ординат – переміщення S , по осі абсцис – час t. На осі абсцисвідкладають відрізок l = (0 - 0), який зображує у масштабі  , період Т, с, одного обороту кривошипа ОА (або кут
, період Т, с, одного обороту кривошипа ОА (або кут  ); на осіординат — лінійні переміщення повзуна В у масштабі
); на осіординат — лінійні переміщення повзуна В у масштабі  , де Smax— максимальний хід повзуна В, м; (4-4΄) — відрізок, мм,на діаграмі, який зображує цей хід.
, де Smax— максимальний хід повзуна В, м; (4-4΄) — відрізок, мм,на діаграмі, який зображує цей хід.
Відрізок l ділять на таку кількість відрізків 0—1, 1—2,..., 7–0, на яку розбита траєкторія точки А (уданому випадку на 8). Точки О,І, 2,... відповідають моментам часу, коли механізм займатиме відповідно положення О, І, 2,... Тоді на ординатах відкладають у вибраному масштабі  , переміщення точки В від крайнього положення В0 за певні проміжки часу. Якщо масштаби довжини (рис. 3.1) і переміщень (рис. 3.4) рівні, то відрізки1—1΄, 2—2', ... на діаграмі будуть відповідно рівні відрізкам B0B1 В0В2,... на плані механізму. Одержані точки 0, 1΄, 2' з'єднують плавною кривою, яка і буде діаграмою переміщень повзуна В: s = s(t).
, переміщення точки В від крайнього положення В0 за певні проміжки часу. Якщо масштаби довжини (рис. 3.1) і переміщень (рис. 3.4) рівні, то відрізки1—1΄, 2—2', ... на діаграмі будуть відповідно рівні відрізкам B0B1 В0В2,... на плані механізму. Одержані точки 0, 1΄, 2' з'єднують плавною кривою, яка і буде діаграмою переміщень повзуна В: s = s(t).
3.3. Дослідження руху механізмів методом кінематичних діаграм
Маючи діаграму (графік) переміщеня, будь-якої точки або ланки механізму як функцію шляху s залежно від чаcу t, методом графічного диференціювання можна визначити швидкості і прискорення точки (ланки), рух якої визначають.
Для побудови діаграми швидкостей v=v(t) використовують залежність
 . (6)
. (6)
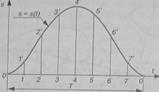
Як відомо, похідна функції s = s(t) у точці А (рис. 3.5) визначається тангенсом кута нахилу дотичної до цієї кривої s = s(t), проведеної через точку А. З урахуванням масштабів побудови діаграми s = s(t) можна записати
ds=∆yμs, dt=∆xμl
Тоді залежність (3.2) набуде вигляду
 (7)
(7)
де α — кут нахилу дотичної у точці А діаграми s = s(t);μs, μt – масштаби діаграми по осях ординат і абсцис відповідно.
Із залежності (7) видно, що швидкість руху точки в будь-якому положенні пропорційно зв'язана з тангенсом кута нахилу дотичної, оскільки масштаби μs і μt , є величинами сталими.
Таким чином, щоб побудувати діаграму швидкостей v=v(t). беруть ряд точок на діаграмі s = s(i) і через них проводять дотичні. Знайшовши тангенс кутів нахилу цих дотичних у відповідних положеннях, будують діаграму tg αі=f(t). Ця діаграма одночасно буде діаграмою швидкостей у деякому масштабі, який можна знайти, використовуючи залежність (7).
На практиці для побудови діаграм швидкостей і прискорень використовують два методи — метод дотичних і метод хорд.
На рис. 5 показані кінематичні діаграми (переміщення, швидкість і прискорення точки В, які побудовані методом хорд.
Дата добавления: 2016-06-15; просмотров: 2899;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
