Види цифрових сигналів, та способи їх передачі
У підрозд. 1.1 були розглянуті сигнали як фізичні носії інформації, а також, природа цифрового сигналу як різновиду дискретних сигналів. Отже, цифровий сигнал - це фізичний носій інформації, що являє собою дискретну послідовність електричного сигналу (найчастіше напруги) низького і високого рівнів, з допомогою яких зображаються двійкові числа 0 і 1. Логічні рівні, яким відповідають логічні змінні лог.0 і лог.1, позначатимемо відповідно  і
і  , зустрічаються ще позначення з англ. абревіатурою
, зустрічаються ще позначення з англ. абревіатурою  , де
, де  - від Low (низький), і
- від Low (низький), і  , де Н - від High (високий).
, де Н - від High (високий).
Погоджено, що при так званій позитивній логіці високим рівнем напруги (відносно нульового рівня напруги) кодується лог.1, а низьким рівнем - лог.0, причому  , а при негативній логіці навпаки,
, а при негативній логіці навпаки,  . У зв’язку з цим ЛЕ можна розглядати з позиції як позитивної логіки (яка, до речі, є найбільш поширеною), так і негативної. Зрозуміло, що функціонування ЛЕ в обох випадках буде різним. Цю особливість іноді зручно використати на практиці, адже перехід з одної логіки до іншої є еквівалентним, що випливає з принципу дуальності і підтверджується правилом де Моргана. В цьому легко переконатись, якщо розглядати, наприклад, дію ЛЕ АБО у позитивній логіці, а дію ЛЕ І - у негативній; їх функціонування буде еквівалентним, бо
. У зв’язку з цим ЛЕ можна розглядати з позиції як позитивної логіки (яка, до речі, є найбільш поширеною), так і негативної. Зрозуміло, що функціонування ЛЕ в обох випадках буде різним. Цю особливість іноді зручно використати на практиці, адже перехід з одної логіки до іншої є еквівалентним, що випливає з принципу дуальності і підтверджується правилом де Моргана. В цьому легко переконатись, якщо розглядати, наприклад, дію ЛЕ АБО у позитивній логіці, а дію ЛЕ І - у негативній; їх функціонування буде еквівалентним, бо 
Єдиним детермінованим цифровим сигналом, що задає темп роботи всього цифрового пристрою чи системи, тобто такти, е сигнал синхронізації (синхросигнал). Як і належить періодичному сигналу, синхро-сигнал характеризується постійним періодом повторення Т та коефіцієнтом заповнення  , де
, де  - тривалість імпульсу; найчастіше
- тривалість імпульсу; найчастіше  (величина, обернена до коефіцієнта заповнення
(величина, обернена до коефіцієнта заповнення  , тобто
, тобто  , називається щілинністю). Синхроімпульси (або тактові імпульси) забезпечують синхронізацію роботи цифрового пристрою чи системи, тобто точне часове узгодження роботи їх складових частин - цифрових елементів, для виконання заданих операцій. Виробляє тактові синхроімпульси генератор тактових імпульсів (ГТІ), який працює незалежно від інших вузлів пристроїв чи системи. Від частоти і стабільності роботи ГТІ залежать швидкодія й стабільність роботи всього цифрового пристрою чи системи.
, називається щілинністю). Синхроімпульси (або тактові імпульси) забезпечують синхронізацію роботи цифрового пристрою чи системи, тобто точне часове узгодження роботи їх складових частин - цифрових елементів, для виконання заданих операцій. Виробляє тактові синхроімпульси генератор тактових імпульсів (ГТІ), який працює незалежно від інших вузлів пристроїв чи системи. Від частоти і стабільності роботи ГТІ залежать швидкодія й стабільність роботи всього цифрового пристрою чи системи.
Іноді термін "синхронізація" замінюється на "стробування", а синхроімпульс називають строб-імпульсом, або сигналом опитування.
Дія синхросигналів забезпечує сталу тривалість циклів виконання тих чи інших операцій незалежно від їх змісту. Такий спосіб керування роботою елементів і вузлів цифрового пристрою називається синхронним. За синхронним принципом працюють синхронні автомати. Дія синхросигналів регламентує роботу цифрового елемента, знижуючи при цьому ймовірність появи збою. При асинхронному способі керування операціями синхроімпульси не потрібні, бо перехід до наступної операції в асинхронних автоматах здійснюється зразу ж після появи інформаційних сигналів. Асинхронний спосіб припускає більшу швидкодію виконання операцій, однак ймовірність збою пристрою при цьому більша.
За способом кодування двійкової інформації цифрові сигнали можуть бути потенційними, імпульсними та імпульсно-потенційними.
Потенційний цифровий сигнал - це високий (лог.1) або низький (лог.0) рівень напруги (або струму), який може залишитися незмінним протягом не менше одного періоду синхроімпульсів (такту). Тому, коли потрібно визначити кількість лог.1 або лог.0, що слідують один за одним, досить перерахувати число синхроімпульсів.
При імпульсному відображенні двійкової інформації значенню лог.1 або лог.0 відповідає наявність або відсутність імпульсу при синфазній дії синхроімпульсу. Отже, ідентифікувати такий цифровий сигнал нескладно.
Імпульсно-потенційний спосіб зображення цифрових сигналів передбачає сумісне використання розглянутих способів. Такий спосіб відображення двійкової інформації називається динамічним. Потенційна складова сигналу використовується переважно для керування (дозволу або заборони роботи цифрового елемента), а імпульсна - для виконання конкретної операції (логічної, арифметичної, опитування, формування тощо).
Цифрові сигнали передають інформацію від джерела (передавача) до споживача (приймача) по каналах зв’язку. Провідники, по яких передаються дані за допомогою цифрових сигналів, називаються лініями, а сукупність ліній - шиною. Каналом зв’язку між передавачам і приймачем може бути як лінія (однопровідна), так і шина. По лінії цифрові сигнали передаються послідовно біт за бітом, починаючи з молодшого біта (МБ), тобто молодшого розряду двійкового числа. Тому першим на вхід приймача надходить МБ двійкового коду (слова), а потім інші біти. Функцію запису кожного біта кодового слова в приймальний пристрій виконують синхроімпульси, такт за тактом. При цьому розряд числа визначається номером такта, починаючи з нульового, що збігається з МБ слова. Отже, для послідовної передачі інформації, що зображена  - бітним словом, потрібно тактів синхронізації. Послідовний спосіб раніше застосовувався переважно для передачі інформації на велику відстань, однак на даний час в зв’язку з переходом частот передачі інформації в радіодіапазон, він застосовується і для передачі сигналів між ІС за допомогою спеціальних послідовних протоколів (SPI, I2C, SPDIF, I2S, тощо). Це зумовлено потребою забезпечення відповідних хвилевих характеристик ліній передачі даних, і природно, це легше зробити для двох-трьох провідників ніж для 8, 16 і т.д.
- бітним словом, потрібно тактів синхронізації. Послідовний спосіб раніше застосовувався переважно для передачі інформації на велику відстань, однак на даний час в зв’язку з переходом частот передачі інформації в радіодіапазон, він застосовується і для передачі сигналів між ІС за допомогою спеціальних послідовних протоколів (SPI, I2C, SPDIF, I2S, тощо). Це зумовлено потребою забезпечення відповідних хвилевих характеристик ліній передачі даних, і природно, це легше зробити для двох-трьох провідників ніж для 8, 16 і т.д.
Для передачі багаторозрядних слів використовують послідовно-паралельний код. при якому слова розбивають на "склади", тобто пакети даних. Наприклад, 32-розрядне слово для асинхронної передачі по однобайтній 8-ми розрядній шині розкладають на чотири "склади" (пакети даних).
За таким способом передачі цифрових сигналів окремі "склади" слова, таким чином, передаються, а іноді й обробляються послідовно, а зображаються паралельно.
Стан лінії або шини може бути активним або пасивним. У першому випадку на лінії або на лініях шини цифрові сигнали (лог.1 або лог.0) присутні. Пасивний стан характеризується відсутністю обох станів, натомість лінія набуває третього, так званого високоімпедансного стану  . У стані на окремій лінії або на шині зв’язку "передавач-приймач" має місце умовний "обрив” - нескінченно великий опір (високий імпеданс), який забезпечує спеціально призначений для цього цифровий елемент - тристановий драйвер.
. У стані на окремій лінії або на шині зв’язку "передавач-приймач" має місце умовний "обрив” - нескінченно великий опір (високий імпеданс), який забезпечує спеціально призначений для цього цифровий елемент - тристановий драйвер.
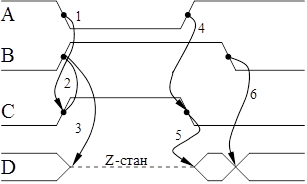
Рис. 2.3 Часові діаграми роботи цифрового пристрою
Для відображення причинно-наслідкових зв’язків між процесами, що протікають у колах взаємодії окремих елементів та вузлів цифрового пристрою чи системи, використовують часові діаграми (рис.2.1). Протікання взаємопов’язаних процесів, що відбуваються на лініях  і шині
і шині  можна легко пояснити, однак зауважимо, що умовне зображення цифрових сигналів на діаграмі, відрізняється від зображення на окремих лініях (стан , зображений пунктирною лінією, - це пасивний стан шини, роздвоєні лінії означають активний стан шини, тобто там може бути або лог.0 або лог.1 Стрілки 1,2 показують, що елемент
можна легко пояснити, однак зауважимо, що умовне зображення цифрових сигналів на діаграмі, відрізняється від зображення на окремих лініях (стан , зображений пунктирною лінією, - це пасивний стан шини, роздвоєні лінії означають активний стан шини, тобто там може бути або лог.0 або лог.1 Стрілки 1,2 показують, що елемент  перейде у стан лог.1 лише після переходу елемента
перейде у стан лог.1 лише після переходу елемента  у стан лог.1, до якого спричиниться елемент
у стан лог.1, до якого спричиниться елемент  , перейшовши у стан лог.0. Стрілка 3 показує перехід шини у стан після перемикання у стан лог.1. Стрілки 4, 5 ілюструють перехід шини в активний стан за умови, якщо на діє перехід
, перейшовши у стан лог.0. Стрілка 3 показує перехід шини у стан після перемикання у стан лог.1. Стрілки 4, 5 ілюструють перехід шини в активний стан за умови, якщо на діє перехід  , на В рівень лог.1, а на - перехід
, на В рівень лог.1, а на - перехід  . Інверсія активного стану на шині (стрілка 6) буде лише при переході на В. Рівні напруг або струмів в багатьох випадках не позначають, однак в технічній документації повинен бути вказаний тип логіки пристрою (ТТЛ, КМОН, тощо).
. Інверсія активного стану на шині (стрілка 6) буде лише при переході на В. Рівні напруг або струмів в багатьох випадках не позначають, однак в технічній документації повинен бути вказаний тип логіки пристрою (ТТЛ, КМОН, тощо).
Дата добавления: 2016-07-22; просмотров: 4906;
Поиск по сайту
Узнать еще
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу
- Імпульсні схеми на цифрових елементах
- Інфляція, її види і вимір
- Інфляція: суть, види та наслідки.
- Авіаційна травма та її види. Особливості судово-медичної експертизи та її значення для встановлення причини авіаційної пригоди.
- Антропоэкология изучает приспособительную изменчивость
- Базові терміни ІС. Види ІТ
- Безробіття, його види та наслідки.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
