Изменения регулируемого параметра.
Ограничение входного сигнала вызвано особенностью управления сервомашинки (ШИМ - сигналом), а ограничение выходного сигнала - предельными значениями отклонения рулевой поверхности.
Для САУ летательный аппарат представляется в виде трех независимых передаточных функций по каналам курса, тангажа и крена, приведенных в зависимостях:
 ,
,
 ,
,
 ,
,
где  ,
,  ,
,  ,
,  - коэффициенты усиления по соответствующим каналам управления;
- коэффициенты усиления по соответствующим каналам управления;  ,
,  ,
,  ,
,  – постоянные времени по соответствующим каналам управления,1/с;
– постоянные времени по соответствующим каналам управления,1/с;  ,
,  – коэффициенты демпфирования по соответствующим каналам управления.
– коэффициенты демпфирования по соответствующим каналам управления.
Коэффициенты передаточных функций по каналам управления автопилота зависят от воздушной скорости полета V.
Системы ориентации могут строиться на различных датчиках физических величин. Для малоразмерных БПЛА наибольшее распространение получили бесплатформенные системы ориентации (БСО) на основе инерциальных датчиков (микромеханических гироскопов и акселерометров). Типичная структурная схема БСО представлена на рис. 2.
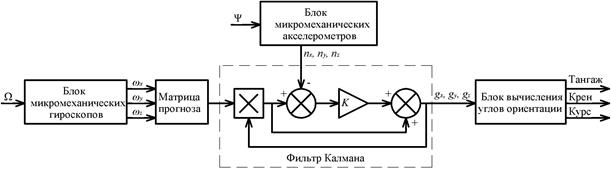
Рис. 2. Типичная структурная схема БСО:
W - угловая скорость вращения БПЛА, Y - угловая ориентация БПЛА
Основными погрешностями БСО считают нелинейность, смещение нуля и шумовую составляющую. Также имеете место дискретность выходных сигналов БСО (в случае применения цифровых интерфейсов передачи данных). В данной работе эти параметры учитываются для анализа переходного процесса САУ с уже подобранными коэффициентами передачи по каналам автопилота. Для первоначального определения значений коэффициентов передачи, БСО можно принять идеальной.
Чтобы система стала адоптивной к воздействию продольного ветра, а планер был устойчив в воздушном потоке, необходимо коэффициенты передачи по каналам тангажа, крена и рыскания представить в виде некоторых функций  и
и  , зависящих от воздушной скорости V. Источником первичной информации о воздушной скорости является датчик воздушной скорости, установленный на носовой части планера.
, зависящих от воздушной скорости V. Источником первичной информации о воздушной скорости является датчик воздушной скорости, установленный на носовой части планера.
Определение параметров функций и производится аппроксимированием их полиномом 3- го порядка:
 ,
,  ,
,
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  – коэффициенты аппроксимирующих полиномов.
– коэффициенты аппроксимирующих полиномов.
Коэффициенты  и
и  можно подобрать исходя из требований переходного процесса. В данной работе приняты следующие требования к переходному процессу:
можно подобрать исходя из требований переходного процесса. В данной работе приняты следующие требования к переходному процессу:
1) минимизация времени переходного процесса;
2) минимизация колебательности (минимизация числа пересечения второй производной от угла ориентации с осью абсцисс).
В данной работе используется метод перебора. Для него необходимо знать заданные границы поиска. Из заданного диапазона выбираются коэффициенты передачи, обеспечивающие необходимое качество переходного процесса, т.е. минимальное время переходного процесса и отсутствие колебательности.
Описание программного обеспечения. Подбор коэффициентов автопилота в ручном режиме занимает много времени и не обеспечивает необходимой точности. На основании вышеизложенного было разработано программное обеспечение (ПО) [2], которое обеспечивает следующий функционал:
1) автоматический подбор значений коэффициентов автопилота по заранее заданным требованиям к переходному процессу;
2) автоматический подбор значений коэффициентов для всего диапазона возможных скоростей полета БПЛА;
3) анализ работы САУ с учетом нелинейности рулевого привода, особенностей его функционирования, дискретности и шумов информационно-измерительных модулей и т.д.
Внешний вид окна ПО представлен на рисунке 3.
В начале работы с ПО следует задать входные данные для параметров планера и рулевого привода. При нажатии на кнопку «Расчет коэффициентов» будет произведено вычисление коэффициентов передаточной функции планера и визуализация их значений. Для построения графика переходного процесса с определенными коэффициентами автопилота необходимо нажать кнопку «Расчет реакции на ступенчатое воздействие». Для подбора коэффициентов автопилота следует воспользоваться кнопкой «Подобрать оптимальные коэффициенты автопилота».
Работа данного ПО была апробирована на БПЛА, состоящем из авиамодели Ripmax, рулевых приводов SRM-102 фирмы «Sanwa Electronic Inc» и САУ, разработанной на кафедре «Приборы управления» ТулГУ.
Значения коэффициентов автопилота, вычисленных с помощью данного ПО, отличались не более чем на 10% от подобранных ранее вручную. При этом качество переходного процесса улучшилось, уменьшилось время переходного процесса, исчезла колебательность.
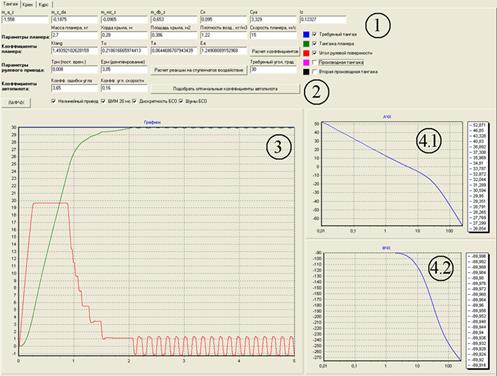
Рис. 3. Внешний вид окна ПО на примере канала тангажа:
Дата добавления: 2020-10-14; просмотров: 600;
Поиск по сайту
Узнать еще
- III. 7. Рост и развитие. Необходимость изменения стратегии
- VII.2. Закономерности изменения свойств нефтей и газов на месторождениях
- VII.I. Закономерности изменения свойств нефтей и газов внутри залежей.
- Адаптационные изменения
- Адаптация RIP-маршрутизаторов к изменениям состояния сети
- Алгоритмы расчета влияния факторов изменения фондоотдачи
- Анализ изменения трудоемкости продукции
- АНАТОМО-ГИСТОЛОГИЧЕСКИЕ ИЗМЕНЕНИЯ БОЛЬНОГО РАСТЕНИЯ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
