Динамика качения колеса по недеформируемой поверхности
Со стороны шасси автомобиля на колесо действуют силы Fx и Fz , а также момент Тк (рис. 7). Вертикальная сила Fz направлена вниз и является резуль-татом воздействия на подшипники колеса приходящейся на него массы автомобиля. Горизонтальная сила Fx в зависимости от режима движения колеса может иметь направление, совпадающее с направлением движения автомобиля (вектор скорости Vx) или противоположное ему. Момент Тк подводится к ведущему колесу от полуоси, этот момент совпадает с направлением вращения колеса и поэтому считается положительным. Если момент Тк подводится от тормозного механизма, его направление противоположно вектору угловой скорости колеса wк , и он считается отрицательным. Возможна также ситуация, когда Тк = 0.
Нормальная реакция от поверхности дороги Rz направлена вверх, причем точка ее приложения у катящегося колеса с эластичной шиной смещена вперед на величину Dх относительно проекции оси вращения колеса на опорную поверхность. Это смещение обусловлено существенным отличием эпюры нормальных давлений в зоне контакта шины с дорогой у неподвижного колеса (эпюра давлений симметрична относительно вертикальной оси колеса и равнодействующая реакция Rz совпадает с этой осью, см. рис. 8, а) и у движущегося

колеса (эпюра давлений несимметрична вертикальной оси колеса, реакции со стороны дороги больше в набегающей области, чем в
сбегающей, что приво-
дит к смещению равнодействующей Rz вперед, см. рис. 8, б).
Продольная реакция Rx поверхности дороги расположена в плоскости дороги и является положительной, если она совпадает с направлением движения колеса, т.е. с вектором Vx .
Уравнение сил, описывающее движение колеса, имеет вид
mк ак = Rx - Fx или Rx = Fx + mк ак , (7)
где mк – масса колеса ; ак - ускорение поступательного движения колеса.
Соответственно уравнение моментов относительно точки О колеса
Jк Ек = Тк - Rz Dx - Rx rд
или Тк = Rz Dx + Rx rд+ Jк Eк , (8)
где Jк – момент инерции колеса относительно оси его вращения ; Ек – ускорение вращательного движения колеса.

Из выражения (8) получим
Rx = Tк / rд - Rz Dx /rд- Jк Ек / rд . (9)
Мощность (Рк), подводимая к колесу, определится из выражения
Рк = Тк wк . (10)
Колесо преобразует вращательное движение в поступательное, при этом, как при всяком преобразовании, происходят потери мощности. Эти потери определяются разностью между мощностью Рк , подводимой к колесу, и мощностью Рав , передаваемой от колеса к автомобилю, т.е.
Рf = Pк - Рав , (11)
где Рf – мощность потерь при качении колеса или мощность сопротивления качению колеса.
|
| |
|
| |
| |
| |
Рав = ( Тк / rд - Rz Dх / rд) wк rк . (12)
Подставим выражения (10) и (12) в формулу (11). Тогда мощность сопротивления качению колеса определится как
Рf = T к wк - (Тк / rд - Rz Dx / rд ) wк rк =
= [ Tк (rд - rк) / rд + Rz Dх rк / rд ] wк . (13)
Отношение Рf / wк = Tf называют моментом сопротивления качению колеса, а отношение Рf / Vx = Ff – силой сопротивления качению колеса.
Условную количественную характеристику f = Ff / Rz называют коэффи- циентом сопротивления качению колеса.
Принимая во внимание равенство (13) развернем выражение f = Ff / Rz , помня, что Ff =Pf / Vx = Рf / wк rк . Получим
f = Dх / rд + Тк (rд - rк) / Rz rд rк = fc + fк , (14)
где fc = Dx / rд – составляющая коэффициента сопротивления качению, характе-ризующая силовые потери, обусловленные смещением нормальной реакции Rz вперед и возникновением момента, противодействующего качению колеса (при отсутствии буксования является главной составляющей этого коэффициента);
fк = Тк (rд – rк) / Rz rдrк – составляющая коэффициента сопротивления качению, характеризующая кинематические потери, вызванные изменением радиуса качения колеса при передаче тягового момента (основное влияние на величину коэффициента сопротивления качению оказывает при существенном буксовании колеса).
В процессе качения колесо автомобиля (колесной машины) находится в одном из следующих режимов: ведущем, свободном, нейтральном, ведомом, тормозном. Для характеристики режима качения колеса используем уравнение силового баланса (9), несколько трансформировав его с учетом выводов формулы (14)
Rx = Tк / rд – Rz fc - Jк Ек / rд . (9¢)
1. Ведущим называют режим качения колеса, при котором оно приводится во вращение моментом Тк , совпадающим по направлению с вектором wк , при этом действующая на ось колеса продольная сила Fх (реакция корпуса автомобиля) противоположна направлению движения, т.е. противоположна вектору Vх (см. рис.7). Режим возможен только при Rх > 0 и, как следует из выражения (9¢),
Тк > Rz fc rд + Jк Ек > 0 .
2. Свободным называют режим качения колеса, при котором оно приводится во вращение моментом Тк , совпадающим по направлению с вектором wк , а продольная сила Fх равна нулю (рис. 9, а).
Следовательно, на указанном режиме Fх = 0 ; Rх = 0 и выражение (9¢) превращается в
Тк = Rz fc rд + Jк Ек > 0 .
3. Нейтральным называют режим качения колеса, при котором оно приводится во вращение моментом Тк , совпадающим по направлению с вектором wк , и продольной силой Fх , совпадающей по направлению с вектором Vх (см. рис. 9, б).
Здесь Тк > 0, а Rх < 0, ( она поменяла направление по сравнению с режимом ведущим ). Тогда
0 < Тк < Rz fc rд + Jк Ек .
4. Ведомым называют режим качения колеса, при котором оно приводится во вращение продольной силой Fх , направление которой совпадает с вектором Vх , а крутящий момент Тк равен нулю (см. рис. 9, в). Следовательно, при этом Fх = Rx < 0 , а Тк = 0 и соответственно из выражения (9¢) получим
Rх = - [ Rz fc + Jк Ек / rд ] < 0 .
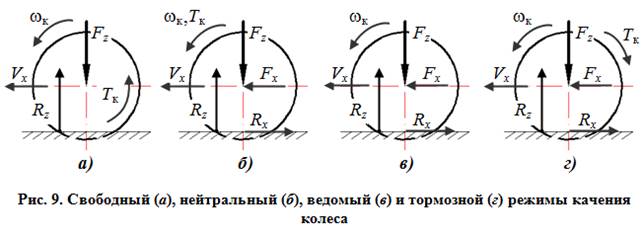
5. Тормозным называется режим качения колеса, при котором оно приводится во вращение продольной силой Fх , направление которой совпадает с вектором Vх , и одновременно оно испытывает действие момента Тк , направленного противоположно вектору wк (рис. 9, г ). В этом случае Fх < 0 , Rх < 0 , Тк < 0, причем
Rх = - [ Тк /rд + Rz fc + Jк Ек / rд ] .
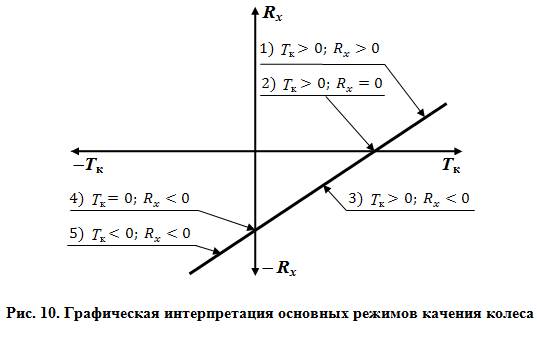
Все перечисленные режимы качения колеса наглядно иллюстрирует гра-
фик зависимости Rх от Тк (рис. 10).
Дата добавления: 2020-10-01; просмотров: 820;
Поиск по сайту
Узнать еще
- Tермодинамика денатурации
- V.VII. Зависимость ширины и формы выхода слоя на поверхности от его истинной мощности, угла падения и формы рельефа
- Адсорбция на поверхности твердых тел.
- Адсорбция полимеров из растворов на твердой поверхности
- Аксонометрические проекции фигур. Проекции геометрических тел. Точки на поверхности тел
- Алгоритмы распознавания образов: метод k ближайших соседей, алгоритм «голосования». Метод потенциальных функций и построения разделяющей гиперповерхности. Алгоритм Айдарханова.
- Анализ процесса качения эластичного колеса по деформируемому грунту
- Антропометрические и масс-инерционные характеристики тела человека. Динамика опорно-двигательного аппарата (ОДА)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
