Электромашинные преобразователи электрической энергии. Система Г - Д
В 20-м столетии в регулируемом электроприводе нашли широкое применение электромашинные преобразователи для питания двигателей постоянного тока независимого возбуждения, так называемые системы Г-Д (рис. 6.1). Примерами применения таких систем можно назвать электроприводы мощных обжимных прокатных станов (слябинги, блюминги), станы холодной прокатки, электроприводы основных механизмов конверторных цехов и т.п.
В схеме рис. 6.1. генератор постоянного тока независимого возбуждения приводится во вращение асинхронным или синхронным двигателем М с  . Якорные цепи генератора Г и двигателя Д соединены непосредственно, а обмотки их возбуждения питаются от возбудителей В1, В2, как правило выполненных на вентильных преобразователях.
. Якорные цепи генератора Г и двигателя Д соединены непосредственно, а обмотки их возбуждения питаются от возбудителей В1, В2, как правило выполненных на вентильных преобразователях.
ЭДС генератора определяется по формуле
 ,
,
где  – конструктивный коэффициент генератора.
– конструктивный коэффициент генератора.

Рис. 6.1. Принципиальная схема включения двигателя по системе Г-Д
Т.к.  , то ЭДС генератора пропорциональна магнитному потоку
, то ЭДС генератора пропорциональна магнитному потоку  , который определяется величиной тока возбуждения
, который определяется величиной тока возбуждения  .
.
Для силовой цепи Г-Д можно составить уравнение равновесия ЭДС
 , (6.1)
, (6.1)
а с учётом того, что 
 .
.
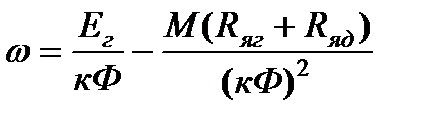
Откуда угловая скорость двигателя Д определяется уравнением
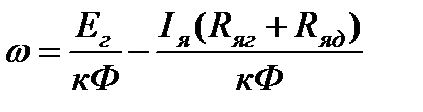 , (6.2)
, (6.2)
где  – соответствующее сопротивление генератора и двигателя.
– соответствующее сопротивление генератора и двигателя.
Так как  , то уравнение механической характеристики системы г-д запишется в виде
, то уравнение механической характеристики системы г-д запишется в виде
 . (6.3)
. (6.3)
Механические характеристики двигателя в системе Г-Д при неизменном магнитном потоке  двигателя и изменении потока
двигателя и изменении потока  генератора (тока возбуждения
генератора (тока возбуждения  ) без учёта реакции якоря представляют собой семейство линейных характеристик с одинаковым модулем жёсткости
) без учёта реакции якоря представляют собой семейство линейных характеристик с одинаковым модулем жёсткости
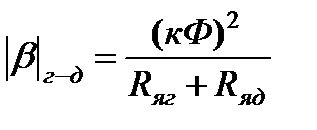 , (6.4)
, (6.4)
и которые представлены на рис.6.2.
Механические характеристики двигателя в системе Г - Д, показанные на рис. 6.2 при  <
<  <
<  , полученных для различных токов возбуждения двигателя, обладают меньшей жёсткостью, чем естественная, а скорость идеального х.х. двигателя
, полученных для различных токов возбуждения двигателя, обладают меньшей жёсткостью, чем естественная, а скорость идеального х.х. двигателя 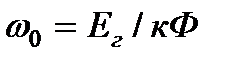 определяется величиной ЭДС генератора и величиной магнитного потока двигателя.
определяется величиной ЭДС генератора и величиной магнитного потока двигателя.
Таким образом, в системе Г - Д имеются два канала управления скоростью двигателя.
Двигатель, включенный по системе Г - Д, может работать и в тормозных режимах. Режим динамического торможения осуществляется при  . Соответствующая этому режиму характеристика проходит через начало координат.
. Соответствующая этому режиму характеристика проходит через начало координат.
Торможение противовключением возникает при условии, что  ,а скорости
,а скорости  и
и  имеютразные знаки, т.е.
имеютразные знаки, т.е.  . Соответствующие характеристики режима противовключения лежат в зоне между осью абсцисс и характеристикой динамического торможения (заштрихованная область на рис. 6.2).
. Соответствующие характеристики режима противовключения лежат в зоне между осью абсцисс и характеристикой динамического торможения (заштрихованная область на рис. 6.2).
Рис. 6.2. Механические характеристики в системе Г-Д
Режим рекуперативного торможения осуществляется при условии  >
>  или < . Характерной особенностью рассматриваемой системы является возможность рекуперации энергии при относительно низкой угловой скорости двигателя, что, например, позволяет осуществить тормозной спуск грузов при пониженной скорости с рекуперацией энергии в сеть в приводах подъёмных механизмов (точка в четвёртом квадранте рис. 6.2).
или < . Характерной особенностью рассматриваемой системы является возможность рекуперации энергии при относительно низкой угловой скорости двигателя, что, например, позволяет осуществить тормозной спуск грузов при пониженной скорости с рекуперацией энергии в сеть в приводах подъёмных механизмов (точка в четвёртом квадранте рис. 6.2).
Основными недостатками системы Г-Д являются:
1. Двухкратное преобразование энергии – электрическая энергия переменного тока преобразуется в механическую, а механическая – вновь в электрическую энергию постоянного тока регулируемого напряжения, что обуславливает относительно высокие потери и низкий КПД (0,85-0,9).
2. Установленная мощность электрических машин определяется выражением
 ,
,
что определяет высокие капитальные и эксплуатационные затраты на такую систему.
3. Преобразователь вращающийся со всеми вытекающими последствиями (шум, вибрации, дорогие фундаменты).
Появление во второй половине 20-го столетия и дальнейшее развитие силовой полупроводниковой техники позволило создать статические преобразователи (выпрямители) практически на любую мощность, напряжение и токи.
Дата добавления: 2019-02-08; просмотров: 1346;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- Cварочные источники энергии.
- Cпециализированные преобразователи
- DC-AC преобразователи. Двухактный инвертор.
- DSM — система классификации Американской психиатрической ассоциации
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
