Синтез ЦСУ с апериодическим переходным процессом.
План лекции:
1. Общие положения.
2. Пример решения задач синтеза ЦСУ с минимальным временем ПП.
3. Общий случай синтеза системы с апериодическим переходным процессом.
Общие положения.
Рассмотренные способы синтеза базировались на основе непрерывных систем, использующих ЛАФЧХ, регуляторы с опережением или отставанием по фазе. Однако структура ЦР отличается большой гибкостью, поэтому можно разработать оригинальные методы, отличные от метода синтеза непрерывных САУ.
Большая часть СУ проектируется так, чтобы переходный процесс в них возможно быстрее достигал требуемого значения. Этот класс систем называется системами с минимальным временем переходных процессов или системами оптимальными по быстродействию. Решение задач синтеза ЦСУ с минимальным временем ПП рассматривается далее.
Пример.
Рассмотрим пример:
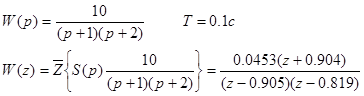
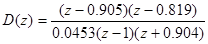
Пусть последовательный цифровой регулятор имеет ПФ
Тогда ПФ разомкнутой скорректированой системы
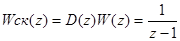
То есть введение КУ приводит к компенсации всех нулей и полюсов исходной системы и появлению нового полюса Z=1
Соответствующая ПФ замкнутой системы:
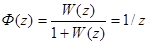
Тогда при ступенчатом входном сигнале
Это означает, что выходной сигнал у[kT] достигает требуемого значения за один период квантования и с этого момента сохраняет требуемое значение. Перерегулирование нулевое. Однако в общем случае, хотя у(кТ) может иметь малое перерегулирование, действительная реакция у(t) может сопровождаться импульсами.
Так как Т<< постоянных времени объекта, можно ожидать, что y[kT] достаточно хорошо совпадает с y(t). Поэтому можно ожидать, что переходная функция достигает установившегося значения через Т=0.1с, а между моментами квантования пульсаций не будет или они будут малы. Такой тип реакции называется апереиодическим переходным процессом.
Апериодический переходный процесс можно получить только в случае, когда есть полная компенсация нулей и полюсов. На практике реальное ограничение приводит к тому, что достичь идеального апериодического процесса невозможно.

3. Общий случай синтеза системы с апериодическим переходным процессом.
Рис. 54.
Что должно быть в результате синтеза:
1. Нулевая установившаяся ошибка при определении входного сигнала.
2. Длительность переходного процесса должна быть минимальной
3. Цифровой регулятор должен быть физически реализуемым
ПФ замкнутой скорректированной системы имеет вид:
 (1)
(1)
откуда
 (2)
(2)
при этом
 (3)
(3)
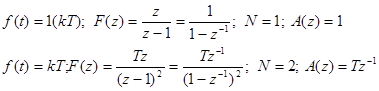
Будем рассматривать класс входных сигналов, изображение которых имеет вид:
 (4)
(4)
где N-натуральное число
A(z)- многочлен от z
В общем случае выражение (*) соответствует входному сигналу типа

Например, при
С учетом (*), используя теорему определьном значении найдем установившуюся ошибку
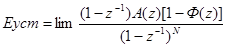 (5)
(5)
Исходя из полученного выражения выясним, что необходимо, чтобы Еуст=0. Так как А(1)<>0,то очевидно, что для этого 1-Ф(z) должно содержать скобку  т.е.
т.е.
 (6)
(6)
где R(z)-полином от Z
Следствием того, что 1-Ф(z) представимо в форме (6) будет выражение:
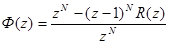
Полюсы Ф(z) могут возникать как :
— нули знаменателя Z=0
— полюсы числителя, так как R(z)-многочлен от Z, то это может быть только Z=0
Таким образом, при сделанных предложениях, Ф(z) имеет единственный полюс Z=0. Характеристическое уравнение имеет вид:

Подставив (6) и (4) в (3) получим
E(z)=A(z)R(z) — это Z-преобразование ошибки.
При этом, так как A(z) и R(z) -полиномы от Z, то E(z) тоже полином от Z и следовательно E(z) имеет конечное число членов при разложении в ряд по степеням Z. Таким образом, пр исделанных предложениях сигнал ошибки сводится к нулю за конечное число периодов квантования.
Таким образом, синтез цифрового регулятора может проводиться так
R(z)®Ф(z)®D(z)
При этом необходимо иметь физически реализуемую ПФ. Это можно проконтролировать при выборе Ф(z)
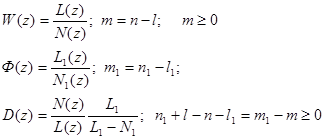
разность степеней числителя и знаменателя не меньше, чем у W(z), это необходимо учитывать при определении Ф(z). Вернемся к соотношению(6). N определяется типом входного сигнала. Тогда
N 

ступенчатый сигнал 1 
линейный 2 
парабола 3 
Видно, что при этом для ступенчатого сигнала минимальное время установления е=0 составляет один такт, для линейного — 2 такта и т.д.
Рассмотренный алгоритм определения D(z) имеет ряд особенностей:
1. Если W(z) имеет нули на единичной окружности или вне ее, то будет нужен енустойчивый регулятор. Этот случай нужно рассматривать отдельно
2. В таблице m=1 и должно быть, чтобы m<=1
Таким образом: если есть такие нули или m>1, то R(z) не может быть 1
Пример:
Пусть

Нельзя взять Ф(z)=1/z из таблицы
Попробуем взять  , тогда
, тогда
При этом

и процесс заканчивается за два такта.
В общем случае при заданном входе, определяющем N, минимальное число переиодов квантования, составляющих переходный процесс, равно
N+m-1
Дата добавления: 2016-07-05; просмотров: 1845;
Поиск по сайту
Узнать еще
- III. Биосинтез крахмала и гликогена.
- Iii. строение, биосинтез и биологическое действие гормонов
- Активация аминокислот при биосинтезе белка.
- Анаболизм прокариот. Биосинтез углеводов
- Анализ и синтез систем автоматического управления электроприводами
- Анализ процессов синтеза атомов и ядер
- Антибиотики, нарушающие синтез белков
- Ассимиляция углерода (фотосинтез)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
