Движений, их параметры в производстве и времени
По целевому назначению исполнительные движения подразделяются на:
1. Движение формообразования поверхности, обозначается – Ф
Если для формообразования поверхности требуется одно формообразующее движение, то оно обязательно является главным, имеет порядковый номер №1 и образует простую группу движения формообразования.
Фυ(В1) – главное вращательное движение;
ФS(П1) – главное поступательное движение;
Если для обрабатывания поверхности требуется несколько движений формообразования, то одно из них является главным, все остальные движения подачи.
Пример: касание – след ФS(П3)
Если между формообразующими движениями существует жесткая кинематическая связь, то они образуют сложную группу движения формообразования, которая имеет индекс υ – если в неё входит главное движение, и индекс S – если в неё входят только движения подачи.
Пример: обработка резьбы на токарно-винторезном станке, Фυ(В1П2),
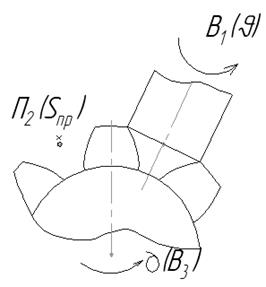
Когда только движение подачи ФS(В2В3) – это цепь обката зубодолбежного станка.
2. Установочные движения, обозначаются – П.
Это относительные движения заготовки их в такое положение при котором становиться возможным обработка с помощью формообразующих движений поверхности требуемого размера.
Пример: поперечное движение резца перед обработкой цилиндрической поверхности требуемого диаметра.
Фυ(В1), ФS(П2)
Установочное движение иногда называют наладочным или движениями позиционирования. При установочном движении обработка не производиться.
3. движение резания, обозначается - Вр(П).
Это установочное движение, при котором осуществляется снятие стружки до получения требуемого размера, движение врезания не является формообразующим.
Пример: копирование след, Фυ(В1).
4. Вспомогательное движение, обозначается – Всп.
Это движение, обеспечивающее например установку, зажим, резание, транспортировку, быстрое перемещение в зону резания и обратно режущего инструмента и заготовки, охлаждение и смазка, правка шлифовального круга и т.д.
5. движение деления, обозначается - ∂(В ), ∂(П ).
Это движение необходимо для получения на заготовке периодически повторяющихся поверхностей. Могут быть прерывистыми.
Пример: обработка ЗК пальцевой модульной фрезой.
Фυ(В1), ФS(П2)
Копирование – касание
6. движение управления, обозначается – Упр.
Эти движения сообщают органу управления движения регулирования и координирования выполнения других движений в МРС.
Пример: переключение муфт зубчатых блоков, реверсивных и предохранительных устройств.
Определяющую роль в формировании кинематической структуры в МРС играют формообразующие движения врезания, деления, и установочные.
Любое исполнительное движение в МРС можно охарактеризовать 5-ю основными пространственно кинематическими параметрами:
– траектория,
– путь,
– скорость,
– направление движения,
– исходная точка траектории.
Наиболее важными параметрами любого движения являются его траектория и скорость. Любой МРС для получения в нем требуемых исполнительных движений имеет один или несколько источников движения, причем современные станки с ЧПУ имеют кол-во источников движения равное числу исполнительных органов. Наиболее распространенные источники движения в универсальных станках, это одно- и много скоростные асинхронные электродвигатели. В станках с ЧПУ двигатели постоянного тока, реже находят применение гидро- и пневмодвигатели, как вращательного, так и поступательного движения.
Дата добавления: 2016-06-29; просмотров: 2024;
Поиск по сайту
Узнать еще
- C.) Опытным путем (по времени выхода забойной пачки).
- H – параметры транзистора
- H-параметры транзистора
- H-параметры транзистора, включенного по схеме с ОБ.
- H-параметры транзистора, включенного по схеме с ОЭ.
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- IV.2. Залежи нефти и газа и их параметры.
- VI.1.Параметры месторождений нефти и газа

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
