Трансмиссии. Системы управления.
В трансмиссии цепных траншейных экскаваторов привод всех механизмов осуществляется преимущественно от одного двигателя – это обычно дизель тракторного типа.
Трансмиссии бывают гидромеханические и механические.
Гидромеханическими трансмиссиями приводятся в движение механизмы, не требующие затрат большой мощности, - механизмы подъема рабочего органа и передвижения экскаватора в процессе разработки траншеи. Некоторые модели траншейных экскаваторов имеют также гидравлический привод ленты конвейера. Приводы рабочих органов и механизма передвижения экскаватора на траншейных скоростях, потребляющие большую часть мощности двигателя, обычно осуществляются механическими трансмиссиями.
Трансмиссии цепных траншейных экскаваторов рассчитываются из условия обеспечения их работы в разных грунтах и при разных поперечных сечениях открываемых выемок. Поэтому, желательно, чтобы рабочий орган имел не менее двух–трех скоростей, отвальный конвейер – две скорости.
Число рабочих скоростей передвижения экскаватора с механической трансмиссией назначается из условия обеспечения всего диапазона изменения скорости передвижения, который в экскаваторах с различным сменным оборудованием достигает 1:100. Перепады скоростей строятся по геометрической прогрессии, показатель которой может приниматься отдельно для интервалов рабочих и транспортных скоростей.
Число рабочих скоростей обычно равно 8-12, а в отдельных моделях этих машин достигает 25.
На рис. 6.5 показана кинематическая схема цепного траншейного экскаватора. Она состоит из коробки перемены передач А трактора, заднего моста трактора Б, редуктора В, в состав которого входит ходоуменьшитель Г и редуктор привода рабочего органа Д, планетарного редуктора Е привода транспортера.
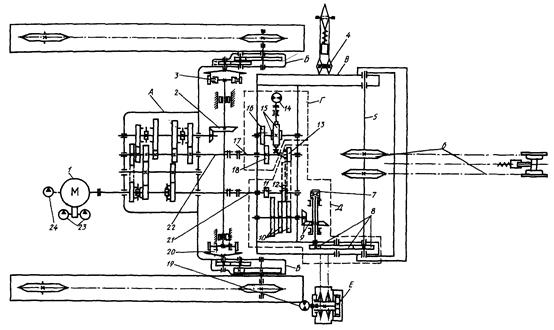
Рис.6.5 Кинематическая схема экскаваторов ЭТЦ – 206, ЭТЦ – 208В.
Крутящий момент от двигателя 1 передается трем насосам 23,24 и тракторной коробке перемены передач А. Насосы питают рабочей жидкостью гидромоторы 14 и 19, а также гидроцилиндры подъема и опускания рабочего оборудования. От коробки перемены передач мощность может передаваться по двум направлениям: 1) через коническую пару 2, бортовые фрикционы 3,20 и редукторы Б на ход (транспортное передвижение), как у трактора Т-130.1.Г-2; 2) от вала отбора мощности через соединительный вал к входному валу 21 через шестерню 11 редуктора Д.
Редуктор увеличивает крутящий момент и передает его через коническую пару 9, предохранительную муфту 7 и редуктор 8 на турасный вал и цепь 6 со скребками рабочего оборудования. Вынесенный на поверхность грунт попадает на скребки транспортера 4, который получает привод от гидромотора 19 через планетарный редуктор Е. Рабочее передвижение экскаватора бесступенчатое (четыре скорости), осуществляется через ходоуменьшитель Г от гидромотора 14, червячную пару 15, шестерни 16, 18, валы 17 и 22, коническую пару 2, бортовые фрикционы 20, 3 и редукторы Б. Включение ходоуменьшителя производится шестерней 16.
Одновременно с рабочим передвижением экскаватора мощность от ходоуменьшителя Г может передаваться через шестерни 13-10 и 13-12-10 на турасный вал рабочего органа.
Для управления ходовым оборудованием служат механические системы управления, которые применяются на тракторах, используемых в качестве базовых машин. С помощью этих систем управляют также отвальным конвейером и рабочим органом. В новейших моделях машин применяются гидравлические системы управления позволяющие использовать автоматизированные устройства для поддержания заданного положения рабочего органа, в том числе наклона дна траншеи, и оптимизации режима копания.
Общий расчет.
Исходным пунктом общего расчета служит задание на проектирование, которым устанавливаются требуемая производительность машины, технологические условия, при которых она должна быть достигнута (размеры траншеи, грунт), и специальные условия (тип привода, ходовое оборудование, тип механизмов управления, допустимое давление на грунт и др.).
Производительность цепного траншейного экскаватора определяют по формуле:

 ; (6.1)
; (6.1)
где, qк- вместимость ковша; n – число ссыпок; кн и кр – соответственно коэффициенты наполнения ковша и разрыхления грунта.
Число ссыпок:
 ; (6.2)
; (6.2)
где Vк – скорость ковшовой цепи; Lк- шаг ковшей.
Тогда  ; (6.3)
; (6.3)
С другой стороны, производительность траншейного экскаватора в зависимости от ширины открываемой траншеи В, ее глубины Н и скорости рабочего перемещения Vэ можно определить по формуле:
 ; (6.4)
; (6.4)
Сопоставив это выражение с выше приведенным, получим уравнение:
 ; (6.5)
; (6.5)
откуда найдем необходимую скорость движения экскаватора:
 ; (6.6)
; (6.6)
Вместимость ковша определяют используя методы теории подобия с ориентацией на машины–аналоги.
Ширина ковша ограничивается шириной траншеи. Высота ковша, свободно разгружающегося через заднюю кромку на внешние отвальные устройства, зависит от диаметра приводных блоков и натяжных барабанов, а также угла наклона ковшовой рамы. Длина ковша – от радиуса кривизны днища ковша, высоты звена цепи, радиуса вписанной окружности многоугольника приводного блока.
Шаг ковшей при обычной гравитационной разгрузке через заднюю кромку ограничен условиями разгрузки: грунт из переднего ковша не должен высыпаться в ковш, следующий за ним. Это достигается, если время свободного падения грунта с передней части ковша до пересечения с траекторией движения передней кромкой последующего ковша не превышает времени подхода следующего ковша к этой точке.
Рекомендации по расчету приведенных параметров изложены в [Л. 20.].
Мощность двигателя траншейного экскаватора расходуется на приводы ковшовой цепи, транспортеров, механизма передвижения и вспомогательных систем.
Точное определение каждой из этих мощностей в отдельности достаточно сложно, поэтому вначале находят мощность для преодоления сопротивлений копанию грунта Nкоп. после чего мощность для преодоления всей нагрузки Nраб определяют по формуле:
 ; (6.7)
; (6.7)
где Ккоп - коэффициент, который условно называют коэффициентом полезного действия рабочего органа, устанавливают опытным путем; для экскаваторов со свободной цепью Ккоп=0,55-0,65;
Мощность Nкоп определяется по формуле:
 ; (6.8)
; (6.8)
где к – удельная энергоемкость копания, Н·м/м3; ηц – КПД привода ковшовой цепи.
Мощность, необходимая для привода передвижения экскаватора:
 ; (6.9)
; (6.9)
где mэ – масса экскаватора; f - коэффициент сопротивления передвижению; i – уклон местности; Рк – сопротивление копанию; β – угол наклона траектории движения ковшей к горизонту; ηпер- КПД механизма передвижения.
Мощность привода конвейера определяют по выражению:
 ;(6.10)
;(6.10)
где кб=1,2-1,4 – коэффициент, учитывающий затраты мощности на перегибы ленты, вращение концевых барабанов и др.; η – КПД привода транспортера; g – ускорение силы тяжести; ρ –плотность грунта; h- высота подъема грунта; l – длина пути перемещения грунта по горизонтали; V – скорость движения ленты транспортера; кn=0,03÷0,06 – приведенный коэффициент сопротивления перемещению ленты на роликах; gл, и gр – удельные погонные силы тяжести ленты и роликов (на единицу длины).
Мощность двигателя экскаватора должна быть достаточна для одновременного действия рабочего органа, отвального конвейера и ходового оборудования, а также для транспортного передвижения с требуемой скоростью. Для подъема или опускания ковшовой цепи мощность, отвечающая этим условиям, оказывается обычно достаточной.
Мощность двигателя в рабочем режиме:
 ; (6.11)
; (6.11)
где ηΙ, ηΙΙ, ηΙΙΙ – КПД соответствующих передаточных механизмов.
Проектирование передаточных механизмов и статистический расчет выполняются по тем же правилам, что и для одноковшовых экскаваторов.
Дата добавления: 2016-06-29; просмотров: 2817;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
