Предельное значение КПД линейных усилителей
Под линейными обычно понимают усилители, в которых управляемые (активные, усилительные) элементы (УЭ) работают в непрерывном режиме. Обобщенные структурные схемы линейных усилителей с последовательным и параллельным включением нагрузки (Н) изображены соответственно на рис 5.63, а, б.
а б
Рис. 5.63. Схемы усилителей мощности:
а – с последовательным и б – параллельным включением нагрузки
Поскольку в случае параллельного включения нагрузки необходимо наличие дополнительного элемента – внутренней нагрузки (ВН), на которой теряется часть энергии источника питания (ИП), то такая схема при построении усилителей мощности практически не применяется, а используется в маломощных каскадах из-за удобства «заземления» управляющего элемента, источника питания и нагрузки.
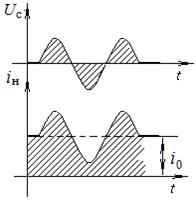 Рис. 5.64. Диаграмма выходного тока для однотактного усилителя мощности
Рис. 5.64. Диаграмма выходного тока для однотактного усилителя мощности
|
В схеме усилителя по рис. 5.63, а напряжение на нагрузке может иметь только одну полярность (за счет однополярного источника питания). В результате получение двуполярного (например, гармонического) сигнала в нагрузке возможно лишь с постоянным «пьедесталом» (рис. 5.64). Наличие «пьедестала» – потребление тока i0 от источника питания при отсутствии сигнала (в режиме «покоя») – свидетельствует о низком КПД такого усилителя, называемого
однотактным.
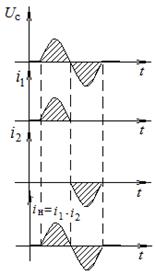
Экономичный режим воспроизведения знакопеременного сигнала при отсутствии или незначительном потреблении энергии от источника питания в режиме «покоя» возможен в двухтактных схемах усилителей, одна из разновидностей которых приведена на рис. 5.65, а. Эпюры токов в такой схеме изображены на рис. 5.65, б.
Определим факторы, обеспечивающие максимально возможное значение КПД двухтактного усилителя (см. рис. 5.65). По определению КПД (h) – это отношение мощности сигнала в нагрузке (Рн) к мощности, потребляемой при этом от источника питания (Рип):
 .
.
а б
Рис. 5.65. Схема двухтактного каскада (а) и диаграмма токов (б)
В общем случае значение КПД зависит от формы сигнала – Uн(t), iн(t), поэтому принято определять предельное значение КПД линейных усилителей при гармоническом сигнале в нагрузке
Uн(t)=Umcosw t; iн(t) = imcos(w t + j).
Тогда, полагая, что Еип = const, и учитывая наличие в схеме двух источников, получаем
 ,
,
где  – период сигнала;
– период сигнала;  – постоянная составляющая источника питания.
– постоянная составляющая источника питания.
Минимальное значение КПД (h=0) имеет место при чисто реактивной (емкостной или индуктивной) нагрузке, когда фазовый сдвиг между током и напряжением достигает 90° (j=p/2). В этом случае активная мощность в нагрузке не развивается и вся мощность, отбираемая от источника питания, рассеивается на управляемых элементах. При чисто активной нагрузке (j=0) имеем
 .
.
Отсюда следует, что значение КПД зависит от коэффициента использования напряжения источника питания gи = Um/Еип и коэффициента использования тока источника питания gi = im / .
Из рис. 5.65, а следует, что приращение напряжения в нагрузке одной полярности не может превышать напряжения источника питания одного плеча двухтактного каскада:
Um < Еип.
Степень этого неравенства зависит от вида вольт-амперных характеристик управляемых элементов и способа их включения. На рис. 5.66 приведен пример графического построения эпюр напряжения и тока в нагрузке для одного плеча двухтактной схемы на биполярных транзисторах с режимом покоя в точке А.
Из построений (рис. 5.66) хорошо видно, что коэффициент использования напряжения gи < 1 из-за наличия остаточного напряжения U0 (точка А¢¢).
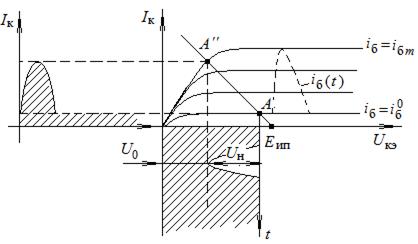
Рис. 5.66. Диаграммы напряжения и тока
для одного плеча двухтактной схемы
Очевидно, что наиболее благоприятным в энергетическом смысле режимом работы линейных транзисторных усилителей является режим достижения заданной мощности в нагрузке при высоких значениях амплитуды напряжения и низких значениях амплитуды тока.
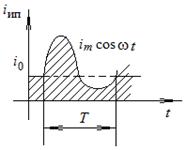 Рис. 5.67. Диаграмма выходного тока одного плеча двухтактного усилителя
Рис. 5.67. Диаграмма выходного тока одного плеча двухтактного усилителя
|
При этом, с одной стороны, увеличивается отношение Um/U0, а с другой – уменьшается абсолютное значение U0. Если при заданных нагрузке и мощности значения Um и im оказываются неблагоприятными в указанном выше смысле, то можно, если это допустимо с других точек зрения, применить согласующий трансформатор. Выбором коэффициента трансформации можно на выходе усилителя (на первичной обмотке) получить требуемое высокое значение напряжения при заданном низком его значении в нагрузке. С учетом сделанных замечаний предельное значение gи ® 1.
Для определения максимального значения коэффициента gi рассмотрим эпюру тока в цепи источника питания двухтактной схемы при заданном токе покоя i0 (рис. 5.67). Постоянная составляющая тока может быть подсчитана по соотношению

или, обозначив i0=e im,
 .
.
Очевидно, что значение iип0, соответствующее максимуму gi, достигается при e = 0, когда gi=p. Полагая, что предельные значения gи=1 и gi=p, получаем максимальное значение КПД двухтактного каскада при гармоническом выходном сигнале:
 .
.
Мощность, рассеиваемая на каждом управляемом элементе, равна половине общей мощности потерь:
 .
.
В случае если требуемая мощность в нагрузке достигается при большой амплитуде напряжения, когда возникают затруднения с выбором транзистора с требуемым высоким значением Uкэдоп, используется мостовая схема (рис. 5.68). В этой схеме транзисторы работают попарно: при одной полярности сигнала открываются транзисторы V1 и V4, при другой – V2 и V3. Максимальная амплитуда сигнала в нагрузке равна
Um = Еи – U0
 Рис. 5.68. Мостовая схема усилителя мощности
Рис. 5.68. Мостовая схема усилителя мощности
|
или (для случая Um>>U0) Um » Еип. Это означает, что требуемое напряжение источника питания при одной и той же амплитуде сигнала в нагрузке в мостовой схеме почти в 2 раза ниже, чем в ранее рассмотренных схемах. В результате и требуемое значение Uкэ доп для транзисторов мостовой схемы также уменьшается в два раза. С другой стороны, при одинаковом напряжении источника питания в мостовой схеме можно получить в два раза большую амплитуду сигнала в нагрузке, что при одинаковой заданной мощности позволит снизить импульс тока через транзисторы в два раза по сравнению с немостовыми схемами. Недостатками мостовой схемы являются существенное усложнение (два дополнительных мощных транзистора со схемами управления) и проблематичность введения обратной связи для стабилизации режима покоя.
Дата добавления: 2016-06-22; просмотров: 2441;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Cравнительная характеристика усилителей на БТ
- I. Выборы: понятие, значение и виды.
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
