Линеаризация нелинейных уравнений
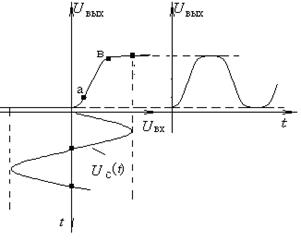 Рис. 2.3. Искажения выходного сигнала, вызванные нелинейностью характеристики «вход-выход» усилителя
Рис. 2.3. Искажения выходного сигнала, вызванные нелинейностью характеристики «вход-выход» усилителя
|
На практике встречается широкий класс задач, когда нелинейность электронного элемента (устройства) не является принципиально необходимой и даже, более того, может оказаться вредной. Так нелинейность характеристики «вход-выход» усилителя приводит к искажению формы усиливаемого сигнала (нелинейные искажения), который может оказаться неприемлемым, например, для качественно воспроизводимой музыки (рис. 2.3).
Ситуация изменится, если входной сигнал подать на вход усилителя на фоне постоянного пьедестала – напряжения смещения Есм (см. рис. 2.4) так, чтобы размах сигнала не выходил за пределы практически линейного участка а–в.
Из рис. 2.4 видно, что, несмотря на сохранившуюся нелинейность характеристики усилителя, переменная составляющая выходного напряжения теперь линейно связана со входным сигналом Uвых(t) = kUc(t).
В принципе, для любого нелинейного элемента с характеристикой «вход-выход»
y = F(x),
для малых приращений относительно некоторого начального значения функции y0 = F(x0)
связь «вход=выход» может быть заменена линейной (рис. 2.5) связью для приращения
Dy = kDx, (2.3)
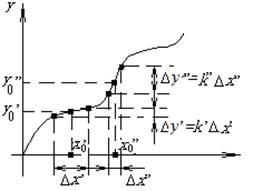 Рис. 2.5. Замена нелинейной зависимости y = F(x) линейной для малых приращений Dy = kDx относительно исходного значения y0, x0
Рис. 2.5. Замена нелинейной зависимости y = F(x) линейной для малых приращений Dy = kDx относительно исходного значения y0, x0
|
Dy = y – y0, Dx = x – x0.
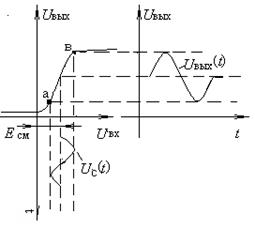 Рис. 2.4. Подача входного сигнала на постоянном пьедестале – напряжении смещения
Рис. 2.4. Подача входного сигнала на постоянном пьедестале – напряжении смещения
|
Хотя уравнение (2.3) выглядит как линейное, оно называется линеаризованным, т. к. коэффициент уравнения k не является постоянной величиной, а зависит от начального значения y0 функции:
k = f (y0).
Замена нелинейной связи y = F(x) линейной для приращений
Dy = kDx
относительно некоторого исходного значения функции y0=F(x0) называется линеаризацией*. Значения y0, x0, определяемые вектором «рабочей точки» по характеристике нелинейного элемента при Dx®0, будем именовать режимом покоя нелинейного элемента (или начальным режимом при Dx = 0). Поскольку коэффициенты линеаризованного уравнения (в т. ч. и дифференциального), а следовательно и параметры устройства зависят от режима покоя, – это понятие очень важно для электроники, а оптимальный выбор режима покоя является достаточно сложной оптимизационной многопараметровой задачей, поскольку характер зависимости отдельных параметров элемента от режима покоя может быть диаметрально противоположным.
Математически переход от нелинейного уравнения к линеаризованному осуществляется путем разложения нелинейной функции в ряд Тейлора в окрестности режима покоя с удержанием в этом разложении только приращения первого порядка.
Для электронного двухполюсника, описываемого на постоянном токе нелинейным уравнением
U = F(i), (2.4)
линеаризованное уравнение примет вид
 . (2.5)
. (2.5)
Очевидно, что коэффициент k уравнения (2.5) имеет размерность сопротивления, которое принято называть дифференциальным сопротивлением, или сопротивлением для приращений:
DU = rDi. (2.6)
Переход от нелинейного уравнения (2.4) к линеаризованному (2.6) позволяет при анализе цепи для приращений заменить нелинейный двухполюсный элемент резистором, сопротивление r которого должно быть определено из статического режима.
Рассмотрим пример использования линеаризации для решения конкретной задачи.
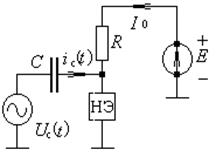 Рис. 2.6. Нелинейная цепь
Рис. 2.6. Нелинейная цепь
|
На рис. 2.6 изображена схема, содержащая нелинейный элемент НЭ с характеристикой
u = ai2.
В схеме действуют два источника – постоянная ЭДС Е и переменный сигнал Uc(t) произвольной формы. Необходимо определить значение тока ic(t), потребляемого от источника переменного сигнала.
Допустим, что графоаналитическим методом определено значение постоянного тока I0.
Линеаризованное уравнение нелинейного элемента
DU = 2a I0DI = rDi, r = 2a I0.
Полагая, что  , заменим нелинейную цепь линеаризованной моделью (рис. 2.7). Теперь анализ такой цепи является достаточно простой задачей. Особенностью линеаризованных моделей цепей является то, что постоянные источники в них отсутствуют, т. к. их приращения равны нулю (источник постоянной ЭДС заменяется закороткой, источник постоянного тока – разрывом).
, заменим нелинейную цепь линеаризованной моделью (рис. 2.7). Теперь анализ такой цепи является достаточно простой задачей. Особенностью линеаризованных моделей цепей является то, что постоянные источники в них отсутствуют, т. к. их приращения равны нулю (источник постоянной ЭДС заменяется закороткой, источник постоянного тока – разрывом).
Рассмотрим алгоритм линеаризации некоторого абстрактного управляющего элемента (рис. 2.8).
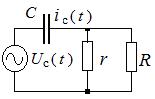
Рис. 2.7. Линеаризованная модель Рис. 2.8. Схема нелинейного
цепи по рис. 2.6 управляемого элемента
Пусть есть нелинейные зависимости
I2 = F(Uу, U2), Uу = F( Iу). (2.7)
Проведем линеаризацию относительно режима покоя
I20, U20, Uу0.
Разложив зависимость (2.7) в ряд Тейлора, получим
 (2.8)
(2.8)
 =r11
=r11  .
.
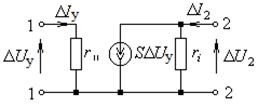 Рис. 2.9. Линеаризованная электрическая модель управляемого элемента Рис. 2.9. Линеаризованная электрическая модель управляемого элемента
|
Оставляя пока без комментариев физический смысл коэффициентов линеаризованных уравнений S, ri, r11 на основании (2.8), можно построить электрическую линеаризованную модель управляемого элемента (рис. 2.9).
Рассмотрим пример использования линеаризованной модели для анализа усилительного устройства, изображенного на рис. 2.10.
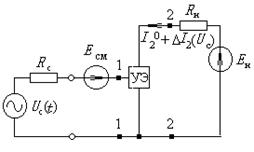 Рис. 2.10. Схема усилительного устройства Рис. 2.10. Схема усилительного устройства
|
За счет источника смещения Есм через управляемый элемент задается ток покоя I20, а под воздействием сигнала Uc(t) этот ток получает полезное приращение DI2(Uc),которое и требуется определить.
Заменим схему нелинейного устройства на рис. 2.10 линеаризованной моделью этого устройства, для чего управляемый элемент заменим линеаризованной моделью, а источники постоянной ЭДС Есм и Ен закоротим (рис. 2.11). Ясно, что задача определения DI2(Uc) по такой схеме решается обычным методом электротехники.
Поскольку нелинейные зависимости (2.7) для конкретных управляемых элементов чаще всего задаются в виде статических (для постоянного тока) вольтамперных характеристик, то коэффициенты линеаризованного уравнения могут быть найдены графически. Допустим, что для некоторого элемента зависимость
I2=F(Uу, U2)
задана графически (рис. 2.12).
Из уравнения (2.8) следует, например, что параметр
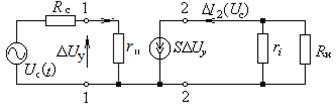 Рис. 2.11. Линеаризованная модель усилительного устройства
Рис. 2.11. Линеаризованная модель усилительного устройства
|
 .
.
Условие DU2=0 означает, что приращения определяют при неизменном значении U20, определяющем режим покоя.
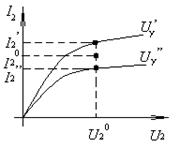  Рис. 2.12. Графическое определение коэффициента линеаризованного уравнения
Рис. 2.12. Графическое определение коэффициента линеаризованного уравнения
|
Из рис. 2.12 очевиден алгоритм определения S. Аналогично можно определить и другие параметры линеаризованной модели, используя их определения из (2.8) и соответствующие вольт-амперные характеристики.
Дата добавления: 2016-06-22; просмотров: 3167;
Поиск по сайту
Узнать еще
- ІІ.3. Понятие о нелинейных фракталах
- А. Причины появления и способа уменьшения нелинейных искажений
- Абсолютная устойчивость нелинейных систем в случае, когда W(p) не является рациональной функцией.
- Автомодельного ламинарного течения жидкости в трубе с использованием системы дифференциальных уравнений, описывающих течение жидкости в трубе
- АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
- Алгоритмы нахождения корней уравнений.
- Анализ уравнений двухгироскопного компаса
- Аналитический метод анализа нелинейных цепей.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
